
teb_local_planner not publishing to cmd_vel
I'm having a similar issue to this question https://answers.ros.org/question/316840/teb_local_planner-does-not-publish-to-cmd_vel/. I'm using ROS melodic Ubuntu 18 LTS on an NVidia Jetson Nano.
I was using DWAPlannerROS with no issues but wanted to try teb_local_planner. However, when I send a goal to move_base from rviz, a path generates but nothing is published on my cmd_vel topic (I've remapped to /dodobot/cmd_vel). I've made sure move_base isn't publishing twist messages to a random topic. Here's a link to my config files:
teb_local_planner: https://github.com/Woz4tetra/dodobot-ros/blob/master/src/db_config/config/move_base/teb_planner_params.yaml
move_base launch: https://github.com/Woz4tetra/dodobot-ros/blob/master/src/db_config/launch/move_base.launch
One difference I noticed between running DWAPlannerROS and teb_local_planner is the move_base will require a SIGTERM if I've specified a goal and teb_local_planner is loaded. If no goal is specified, the node will shutdown normally. I turned on debug messages and saw this message appear:
Planner thread is suspending
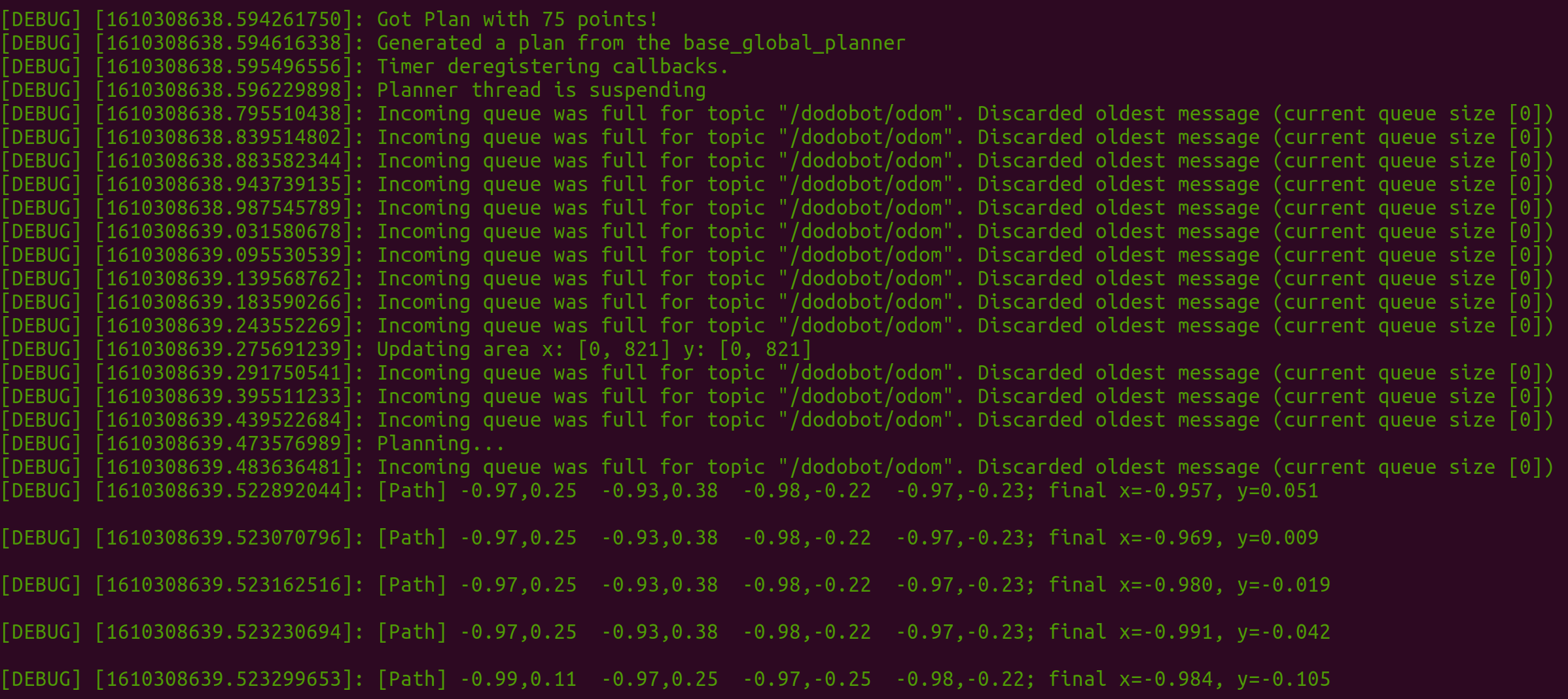
I don't know if the Discarded oldest message (current queue size [0]) message is a problem. It appeared when running DWA so I assume it isn't. I can't figure out what would be causing teb_local_planner to suspend if that is in fact the problem.
tl;dr
DWAPlannerROS is publishing to /dodobot/cmd_vel with no issues. With a similar setup, teb_local_planner is not publishing any twist messages on any topic and appears to be suspended from some reason.
Edit 1
Planner thread is suspending appears when I run with DWA as well. So it's not the issue.
