
local costmap tuning and shadow

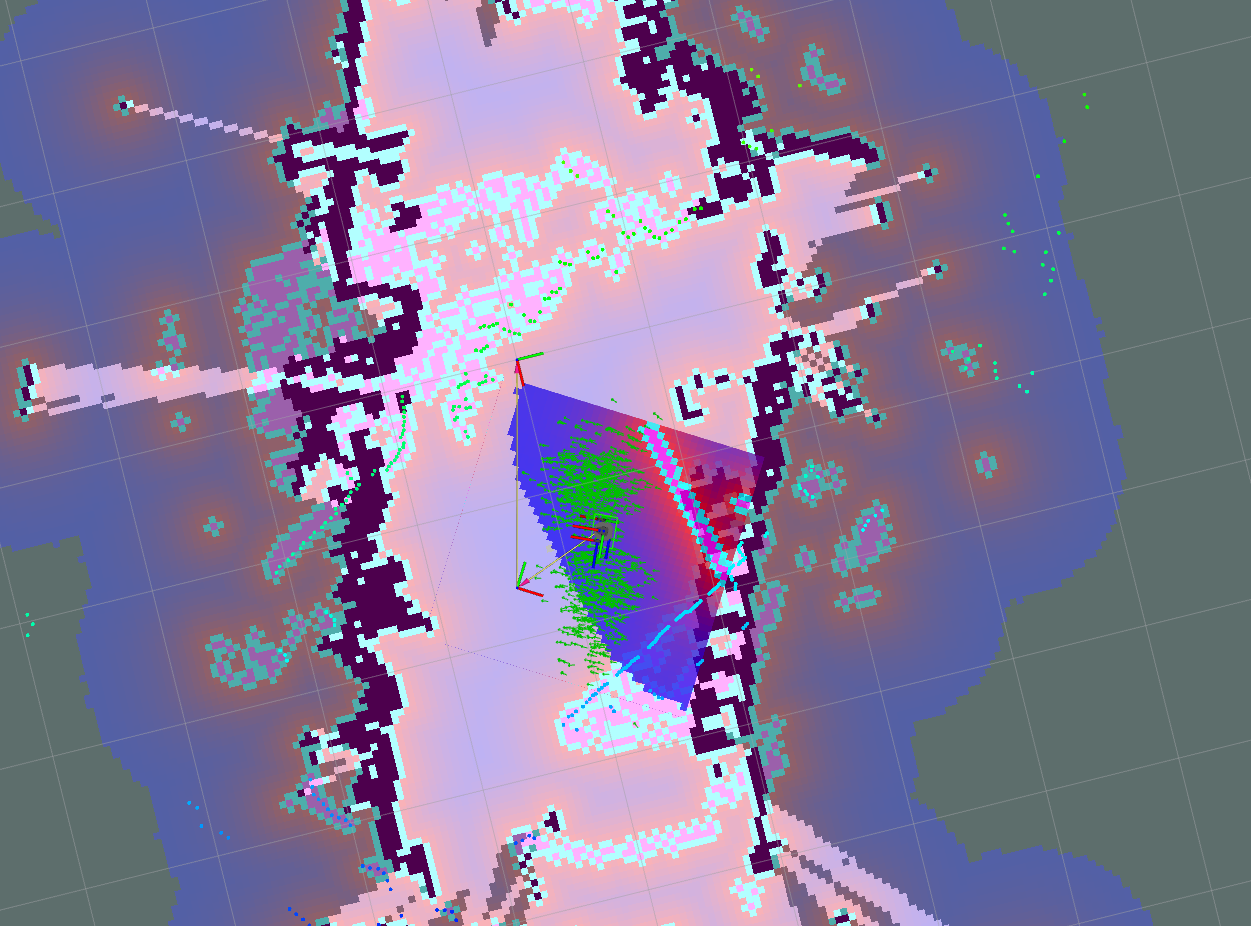
When i rotate the robot. The local costmap remains somekind of shadow behind like shown below:
 i'm using ros noetic ubuntu server 20.
Also how to tune the amcl for rplidar a1 for more accurate localizaton, i followed this guide but no success.
i.e the costmap also moves along with robot when is rotated leaving a shadow like shown in image above.
This are my amcl parameters:
i'm using ros noetic ubuntu server 20.
Also how to tune the amcl for rplidar a1 for more accurate localizaton, i followed this guide but no success.
i.e the costmap also moves along with robot when is rotated leaving a shadow like shown in image above.
This are my amcl parameters:
<launch>
<!-- Arguments -->
<arg name="scan_topic" default="scan"/>
<arg name="initial_pose_x" default="0.0"/>
<arg name="initial_pose_y" default="0.0"/>
<arg name="initial_pose_a" default="0.0"/>
<!-- AMCL -->
<node pkg="amcl" type="amcl" name="amcl">
<param name="min_particles" value="50"/>
<param name="max_particles" value="2000"/>
<param name="kld_err" value="0.02"/>
<param name="update_min_d" value="0.20"/>
<param name="update_min_a" value="0.20"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.5"/>
<param name="recovery_alpha_slow" value="0.00"/>
<param name="recovery_alpha_fast" value="0.00"/>
<param name="initial_pose_x" value="$(arg initial_pose_x)"/>
<param name="initial_pose_y" value="$(arg initial_pose_y)"/>
<param name="initial_pose_a" value="$(arg initial_pose_a)"/>
<param name="gui_publish_rate" value="50.0"/>
<remap from="scan" to="$(arg scan_topic)"/>
<param name="laser_max_range" value="12"/>
<param name="laser_max_beams" value="359"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="laser_model_type" value="likelihood_field"/>
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<param name="odom_alpha3" value="0.2"/>
<param name="odom_alpha4" value="0.2"/>
<param name="odom_frame_id" value="odom"/>
<param name="base_frame_id" value="base_footprint"/>
</node>
</launch>
I'm using rplidar a1. Here is the video demo showing this issue. Here i'm controling the robot from joystick. If someone has used the same lidar i.e rplidar a1 for their autonomous robot please can you post your amcl parameters after tuning?


When you look at the TF tree, are the base_footprint and the frame of /scan connected?
yes they are.
is this happeneing cas of map quality?
I don't think it's the quality of the map.
Now the localization issue is solved but still the shadow costmaps are remaining.