
move base not sending twist command

I'm trying to use the move base package in my robot. It is using rplidar A1 as lidar data source, pi 4 as on board computer. But when i launch this nodes i'm getting this error after running roswtf node:
Found 1 error(s).
ERROR The following nodes should be connected but aren't:
* /medicbot/move_base->/medicbot/move_base (/medicbot/move_base/local_costmap/footprint)
* /medicbot/move_base->/medicbot/move_base (/medicbot/move_base/global_costmap/footprint)
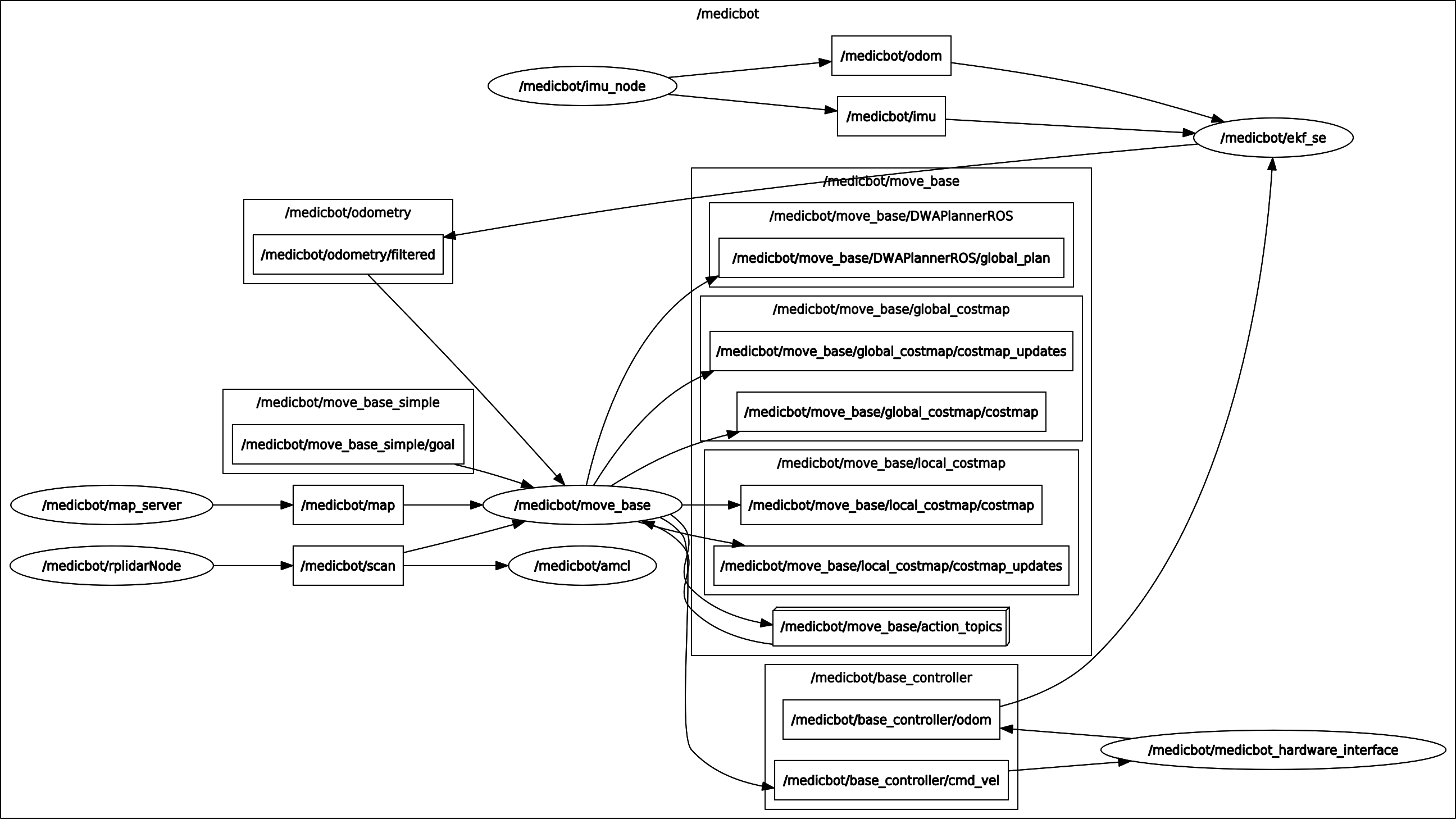
Here is the rosgraph of active topics:

Is the foot print of robot defined in the YAML file? - I understand this is a super basic question, but since you didn't address it, thought I would ask.
yes. i changed the base_link to base_footprint in the move base configuration files. but still the same error is showing when running roswtf command. + now their is no error message in the rviz display pannel.