
PointCloud2 "Large" Points
Hello,
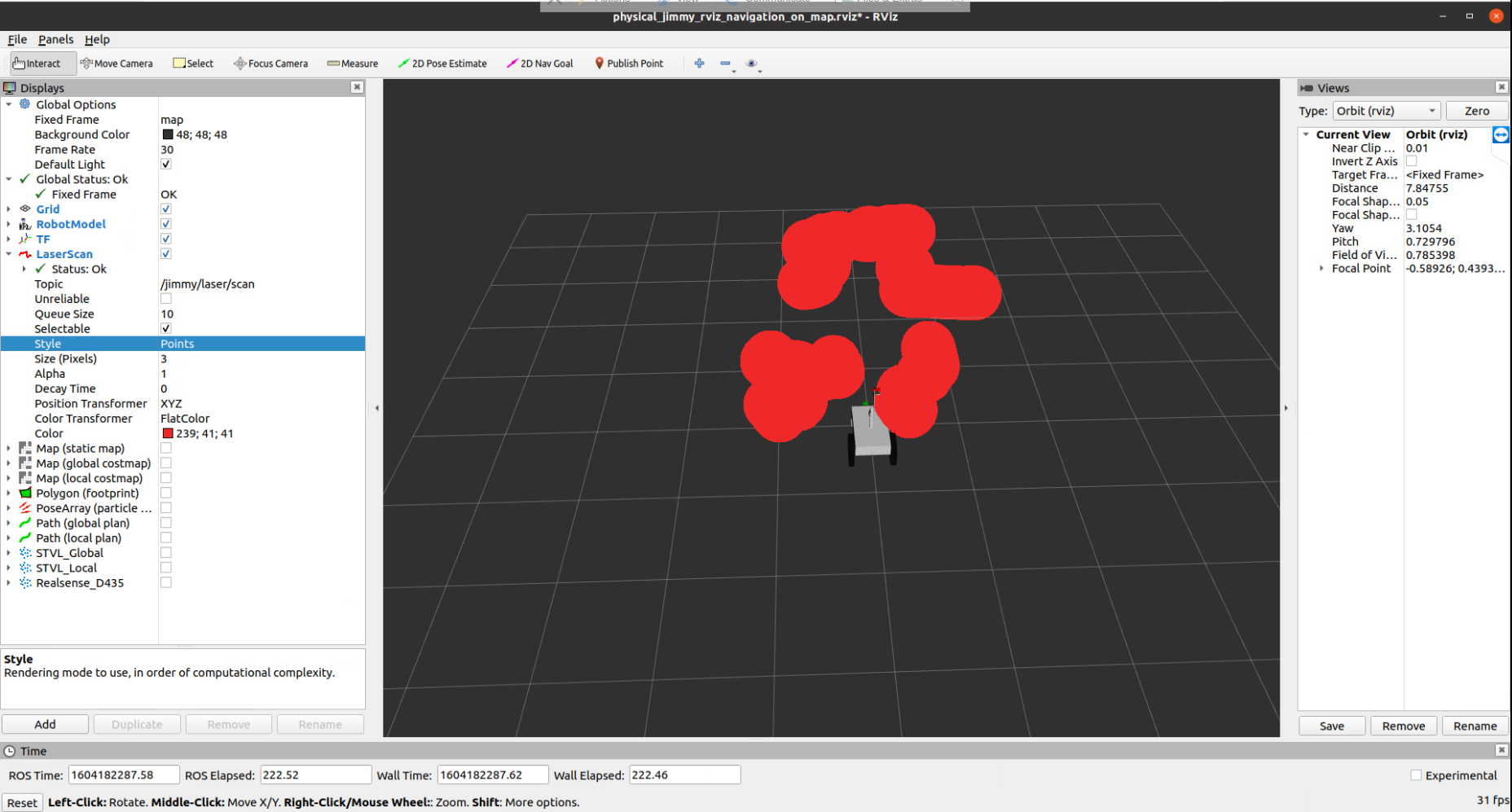
I am using RViz to display a PointCloud2. When I set the Style option to anything other than 'Points', I can see my point cloud rendered expected. However, when I set the Style option to 'Points', I see very large "pixels", regardless of the value set in the Size (pixels) option. I have links to pictured below.
I understand that 'Points' is meant to allow the highest performance when rendering point clouds, but I am finding that not only are the points too big to be useful, they also bring my rendering performance to a crawl.
I am running ROS Melodic on Ubuntu 18.04.
I suspect this is less an issue with ROS/RViz as it is with the graphics on my system, but I don't know how to confirm this. I have attached my OpenGL and RViz information below.
If anyone can provide any guidance as to what might be the problem, I would much appreciate it.
Best, -Eric
OpenGL Settings:
name of display: :0
display: :0 screen: 0
direct rendering: Yes
server glx vendor string: SGI
server glx version string: 1.4
server glx extensions:
client glx vendor string: Mesa Project and SGI
client glx version string: 1.4
client glx extensions:
GLX version: 1.4
GLX extensions:
Extended renderer info (GLX_MESA_query_renderer):
Vendor: Intel (0x8086)
Device: Mesa Intel(R) Iris(R) Plus Graphics (ICL GT2) (0x8a52)
Version: 20.3.0
Accelerated: yes
Video memory: 3072MB
Unified memory: yes
Preferred profile: core (0x1)
Max core profile version: 4.6
Max compat profile version: 4.6
Max GLES1 profile version: 1.1
Max GLES[23] profile version: 3.2
OpenGL vendor string: Intel
OpenGL renderer string: Mesa Intel(R) Iris(R) Plus Graphics (ICL GT2)
OpenGL core profile version string: 4.6 (Core Profile) Mesa 20.3.0-devel (git-c5b2319 2020-08-07 bionic-oibaf-ppa)
OpenGL core profile shading language version string: 4.60
OpenGL core profile context flags: (none)
OpenGL core profile profile mask: core profile
OpenGL core profile extensions:
OpenGL version string: 4.6 (Compatibility Profile) Mesa 20.3.0-devel (git-c5b2319 2020-08-07 bionic-oibaf-ppa)
OpenGL shading language version string: 4.60
OpenGL context flags: (none)
OpenGL profile mask: compatibility profile
OpenGL extensions:
OpenGL ES profile version string: OpenGL ES 3.2 Mesa 20.3.0-devel (git-c5b2319 2020-08-07 bionic-oibaf-ppa)
OpenGL ES profile shading language version string: OpenGL ES GLSL ES 3.20
OpenGL ES profile extensions:
Output of rviz -l:
[ INFO] [1596800356.865896037]: rviz version 1.13.13
[ INFO] [1596800356.865967381]: compiled against Qt version 5.9.5
[ INFO] [1596800356.865984693]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1596800356.870566391]: Forcing OpenGl version 0.
[ INFO] [1596800357.045060025]: Creating resource group General
[ INFO] [1596800357.045133569]: Creating resource group Internal
[ INFO] [1596800357.045162747]: Creating resource group Autodetect
[ INFO] [1596800357.045211839]: SceneManagerFactory for type 'DefaultSceneManager' registered.
[ INFO] [1596800357.045362705]: Registering ResourceManager for type Material
[ INFO] [1596800357.045391717]: Registering ResourceManager for type Mesh
[ INFO] [1596800357.045414219]: Registering ResourceManager for type Skeleton
[ INFO] [1596800357.045443059]: MovableObjectFactory for ...


@eschoof I have the same issue. Did you find a work around or solution? Looks like it's an RViz bug: https://github.com/ros-visualization/...