
How to implement op planner's obstacle avoidance and lane change?

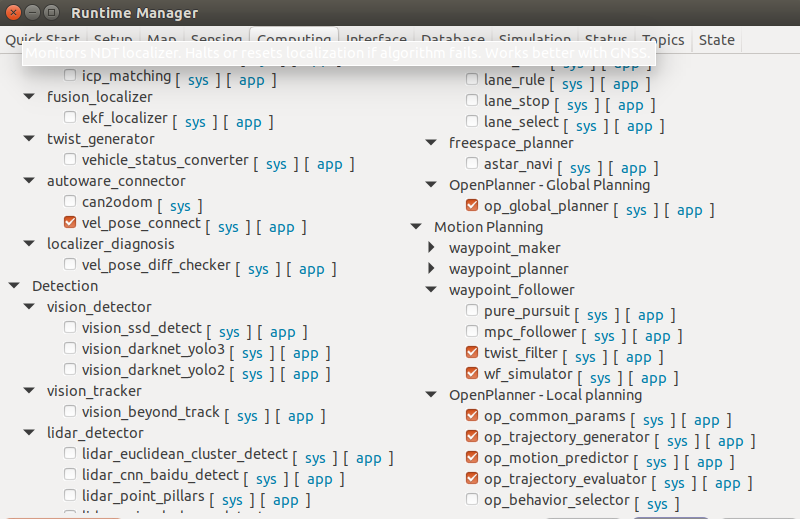
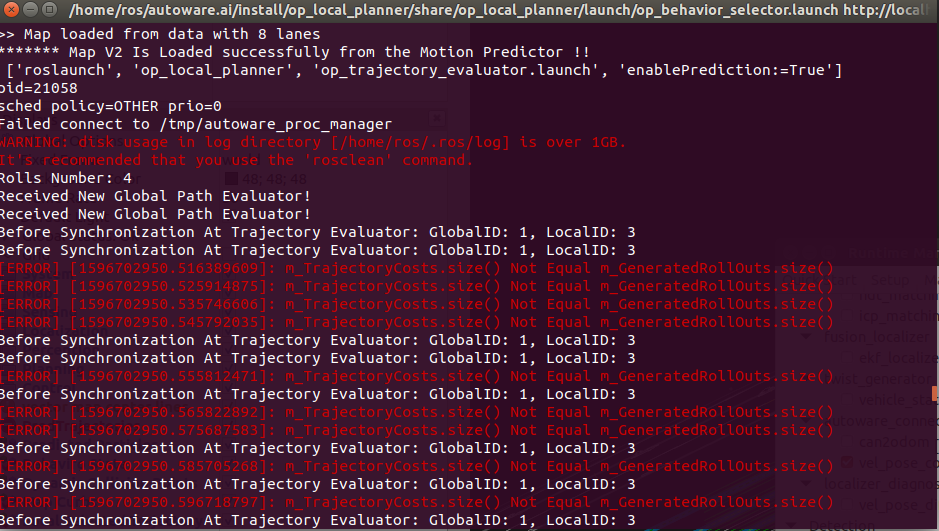
I have done this with op_global_planner ang op_local_planner,but when I push op_trajectory_evaluator the error shows.Can someone tell me how to implement lane change by open planner?

I noticed on your first image you don't have behavior selector turned on. Is this correct?
It does't matter open it or not , I have tried several times. The critical step is the error about op_trajectory_evaulator.