
tf: I can't explain "unknown publisher" and rviz cant display laserscan
Something is broken in my transforms and I cannot figure it out. I've reduced it to a very small case. There are various symptoms. Any help whatsoever in solving this which has dogged me for a while! I can add more diagnostic output as requested!
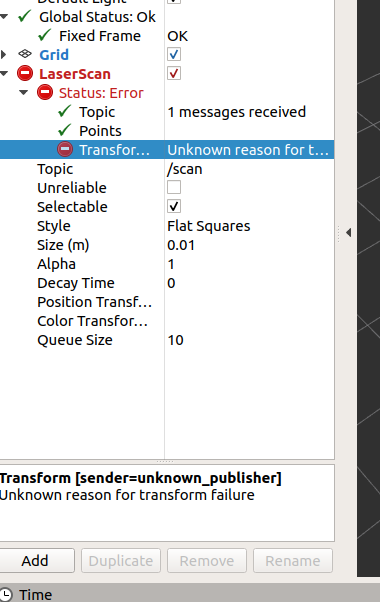
In Rviz I am unable to display the /scan topic because:
Checking tf_monitor, I see the "unknown publisher"
* `rosrun rf tf_monitor`
RESULTS: for all Frames
Frames:
Frame: /base_scan published by unknown_publisher Average Delay: -0.0403111 Max Delay: 0.0037402
Frame: base_link published by unknown_publisher Average Delay: 0.000728638 Max Delay: 0.0359882
All Broadcasters:
Node: unknown_publisher 54.9387 Hz, Average Delay: -0.0179345 Max Delay: 0.0359882
And yet when I check the nodes on the raspberry pi which is also running roscore:
$ rosnode info /base_link_to_base_scan
--------------------------------------------------------------------------------
Node [/base_link_to_base_scan]
Publications:
* /rosout [rosgraph_msgs/Log]
* /tf [tf2_msgs/TFMessage]
Subscriptions: None
Services:
* /base_link_to_base_scan/get_loggers
* /base_link_to_base_scan/set_logger_level
contacting node http://192.168.1.43:32923/ ...
Pid: 3406
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
* topic: /tf
* to: /rviz_1596546734413552188
* direction: outbound
* transport: TCPROS
and on my remote computer:
pitosalas@u:~$ rosnode info /base_link_to_base_scan
--------------------------------------------------------------------------------
Node [/base_link_to_base_scan]
Publications:
* /rosout [rosgraph_msgs/Log]
* /tf [tf2_msgs/TFMessage]
Subscriptions: None
Services:
* /base_link_to_base_scan/get_loggers
* /base_link_to_base_scan/set_logger_level
contacting node http://192.168.1.43:32923/ ...
Pid: 3406
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound (59877 - 192.168.1.43:59698) [11]
* transport: TCPROS
* topic: /tf
* to: /rviz_1596546734413552188
* direction: outbound (59877 - 192.168.1.35:57760) [10]
* transport: TCPROS

Maybe I read it wrong but do you have two nodes publishing the base_link_to_base_scan tf?
Thanks @billy ! Really? What is telling you that? I have to dig into my launch files but that would be a good explanation!
Oh no - my bad - both running same PID. There is a small chance I was looking at ROS.org while on a Zoom meeting and wasn't paying close attention to either.
@billy no problem. Do you have any other troubleshooting suggestion? I am at a loss and no one on this list seems to know either! Maybe you have a suggestion on something to check?
@gvdhoorn It would be super-great if you took a look at this and gave me some suggestion on how to track down what the bug is?