
Simulation of human motion in RViz using IMU sensors
I have been trying to use IMU sensors to capture the motion of the lower limbs of a human model in RViz. I am using an URDF model from the following Github Repo here. The issues I am facing are:
Unable to create a floating base joint to move the model in RViz. I created a floating base joint that connected the joint (basefoot_print) to the pelvis. When I did this, I got the following warning:-
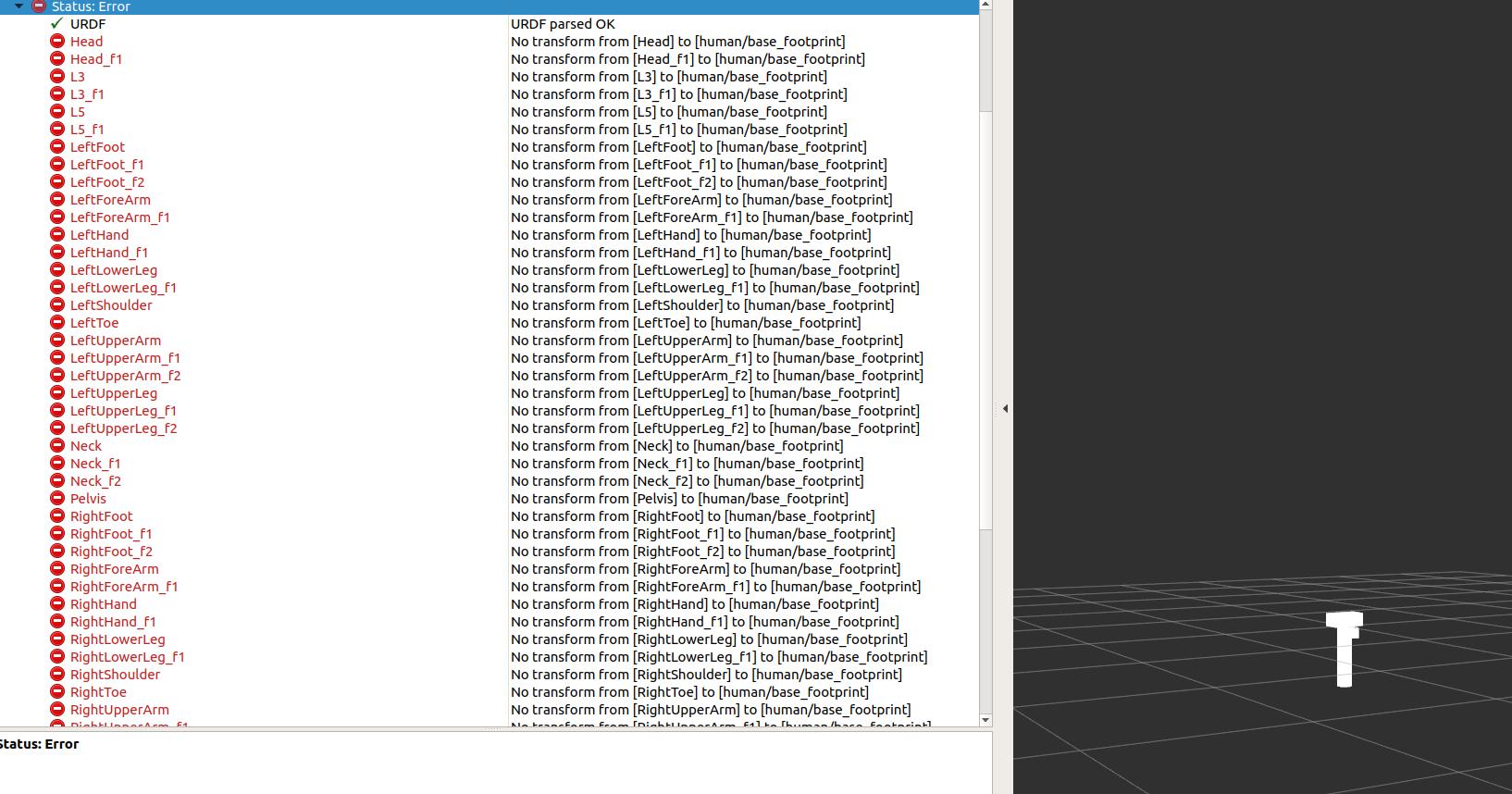
[ WARN] [1594841838.719680990]: Unable to update multi-DOF joint 'core': Failure to lookup transform between 'human/base_footprint' and 'Pelvis' with TF exception: "human/base_footprint" passed to lookupTransform argument target_frame does not exist. Also, in the RViz the robot model showed an error (No transform from [one link] to [another]). Attached a picture of the error seen in RViz
- Create another joint called Odom and tried to publish the Static TF to the base_footprint which is something similar to that shown in the description of NAO robot. This did not work as well. The joints did not move.
Can someone help me fix this issue, please?
Kindly find the error seen in the RViz.
Thanks

Did you already find a solution?
No, not yet. I am tried to use IMU filter to obtain the orientation information. I am trying to get the position by double integration of linear acceleration. But still have not found a way to move the URDF (simulate walking) in RViz