
how to manually translate a point from one frame to another

Hello
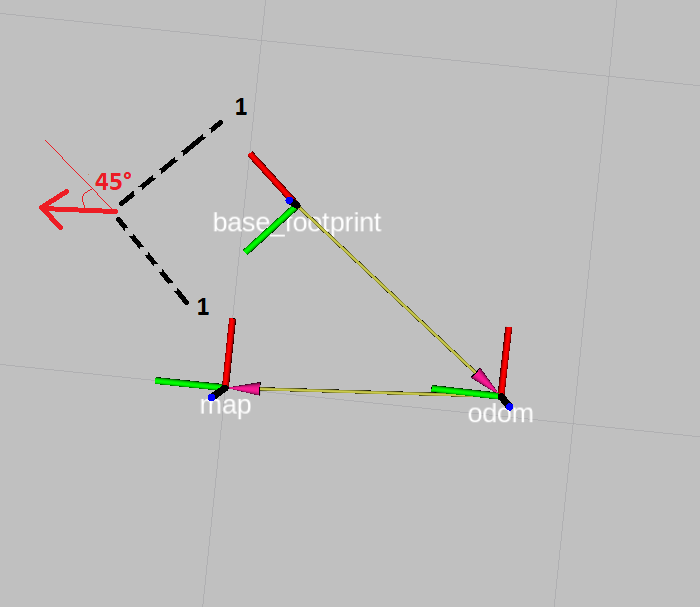
I would like to know how to manually translate a point in the base_footprint frame to the odom frame. For example, I have a point that is at x = 1 and y = 1 and yawZ = 45º and I want to know where this point is in the Odom frame. How can I manually calculate this point? Is there a translation matrix that I can use? Any example?
header:
seq: 7486
stamp:
secs: 74
nsecs: 871000000
frame_id: "odom"
child_frame_id: "base_footprint"
pose:
pose:
position:
x: 0.469335747998
y: 0.647538786158
z: -0.000006047411929
orientation:
x: -0.000021128906712
y: -0.000009339980052
z: -0.461892491102
w: -0.886935919968
target_pose:
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: 'base_footprint'
pose:
position:
x: 1.0
y: 1.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.383000
w: 0.924000"
add a comment
