
"map" topic not visible when running "indoor_slam_gazebo.launch" in hector_quadrotor
I am using the Hector Quadrotor Indoor Project using ROS Development Studio, running the "indoor_slam_gazebo.launch" file in the hector_quadrotor_demo package.
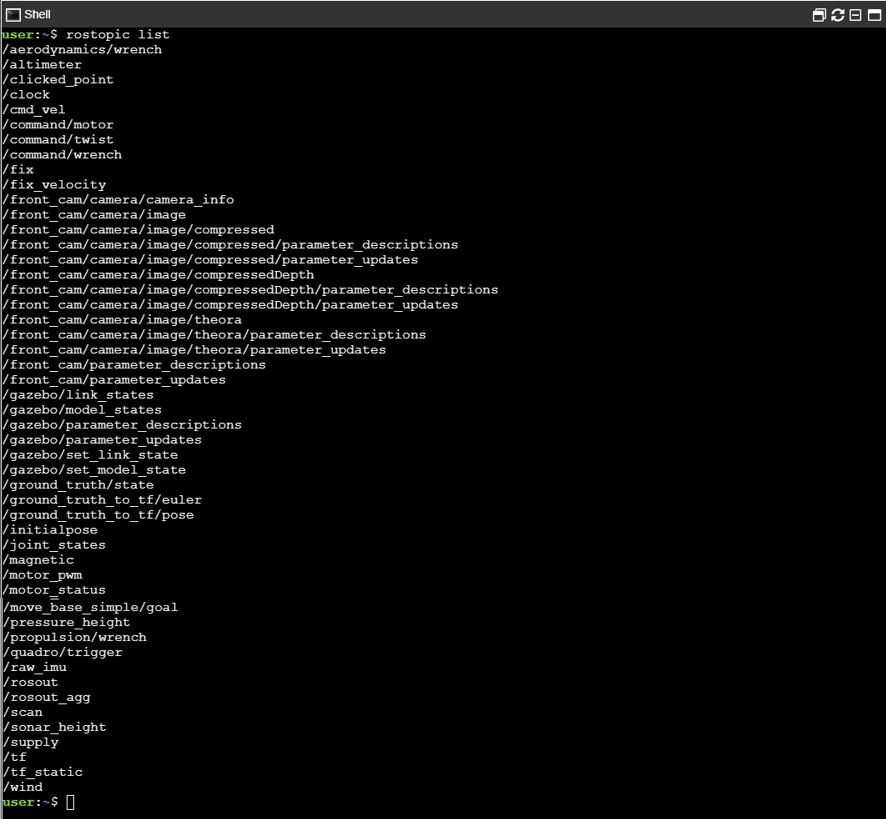
The simulation in Gazebo appears to be working properly as does the visualization in RVIZ. The issue is that the map topic does not appear to be present and I therefore cannot view the map produced by the HectorSLAM algorithm. Is there something wrong with the package or do I need to modify it in some way? I'm not sure if i've just overlooked something simple that just needs to be remapped etc?
I've been searching but it doesn't appear as though anybody else has had the same problem.
Thank you!
add a comment
