
Transform error: "base_link" passed to lookupTransform argument source_frame does not exist.
Hey folks, I hope you all are doing well. On running ow5_moveit.launch file, I am getting below error:
[ERROR] [1589293820.283521920, 894.115000000]: Transform error: "base_link" passed to lookupTransform argument source_frame does not exist.
[ERROR] [1589293820.283623321, 894.115000000]: Transform cache was not updated. Self-filtering may fail.
After doing some research, I found out the error is related to the PointCloud Occupany Map Updater. It has been specified in sensors.yaml configuration file which is being used in the ow5_moveit_sensor_manager.launch.xml file. When I comment the contents of sensors.yaml file, everything is working and I am not getting any error.
I would really appreciate someone's help or advice on this. Thanks in advance.
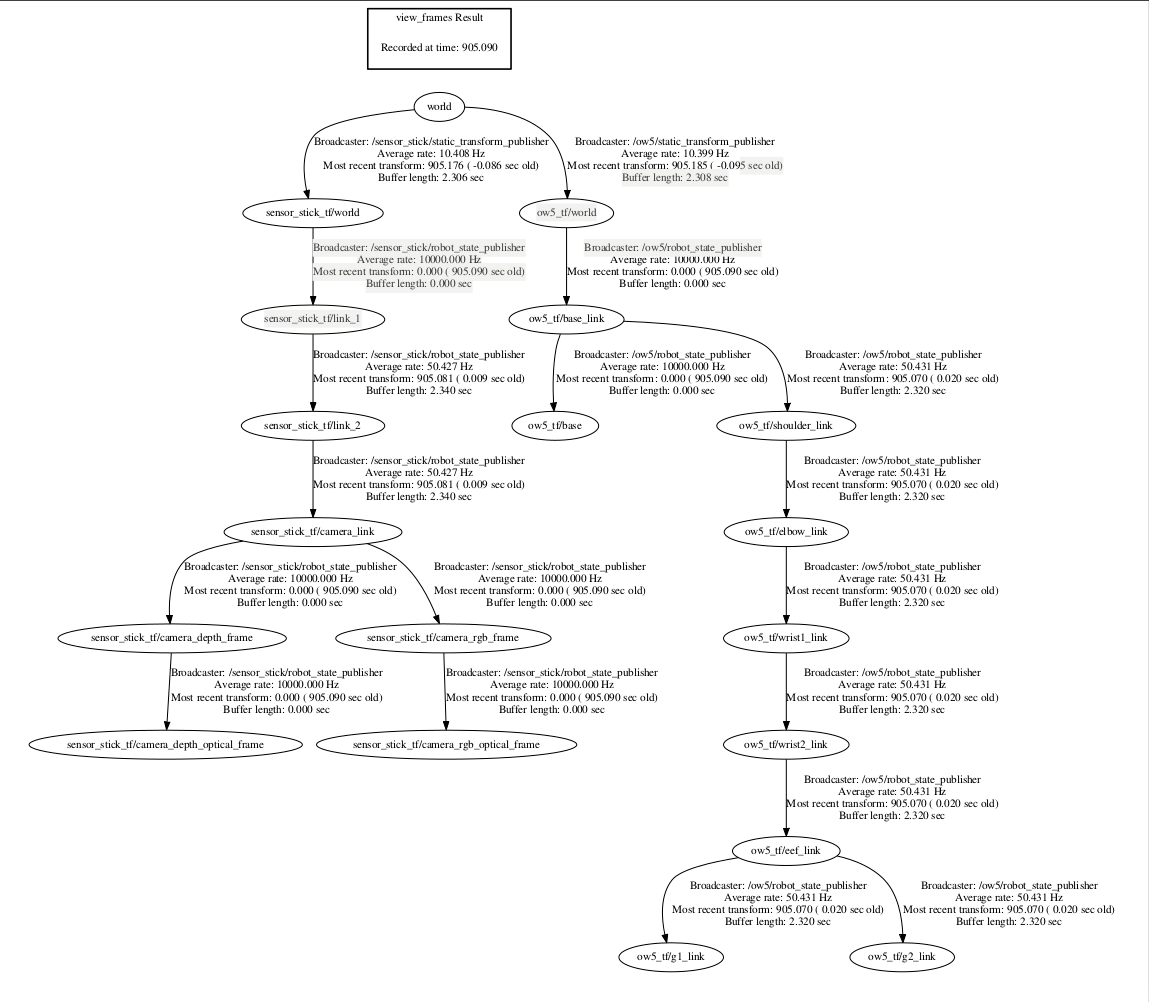
output of rosrun tf view_frames:
ow5_moveit_sensor_manager.launch.xml
<launch>
<!-- Set the file describing which sensor(s) to use to build the octomap -->
<arg name="moveit_octomap_sensor_params_file" default="$(find ow5_robot)/config/sensors.yaml"/>
<!-- Params for the octomap monitor -->
<param name="octomap_frame" type="string" value="world" />
<!-- sensors used to update the map -->
<rosparam command="load" file="$(arg moveit_octomap_sensor_params_file)" />
</launch>
sensors.yaml
sensors:
- sensor_plugin: occupancy_map_monitor/PointCloudOctomapUpdater
point_cloud_topic: /camera/depth_registered/points
max_range: 2.5 #default value: 2.5
frame_subsample: 1 #default value: 1
point_subsample: 1 #default value: 1
padding_offset: 0.01 #default value: 0.01
padding_scale: 1.0 #default value: 1.0
filtered_cloud_topic: filtered_cloud #Use only for debugging
ow5_moveit.launch
<launch>
<!-- By default, we are not in debug mode -->
<arg name="debug" default="false" />
<arg name="config" default="true" />
<arg name="use_gui" default="false" />
<rosparam command="load" file="$(find ow5_moveit)/config/joint_names.yaml"/>
<include file="$(find ow5_moveit)/launch/move_group.launch"/>
<!-- launch rviz-->
<!-- <node name="$(anon rviz)" pkg="rviz" type="rviz" respawn="false"
output="screen" args="-d $(find ow5_robot)/config/ow5.rviz"/> -->
<include file="$(find ow5_moveit)/launch/moveit_rviz.launch">
<arg name="config" value="$(arg config)"/>
<arg name="debug" value="$(arg debug)"/>
</include>
</launch>
demo.launch (for starting gazebo simulation world)
<launch>
<!--Launch a gazebo world-->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find ow5_robot)/worlds/demo.world"/>
<arg name="use_sim_time" value="true"/>
<arg name="paused" value="false"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
<!-- BEGIN ow5 robot-->
<group ns="ow5">
<param name="tf_prefix" value="ow5_tf" />
<include file="$(find ow5_robot)/launch/robot_spawn.launch" >
<arg name="init_pose" value="-x 0 -y -0 -z 0 -R 0 -P 0 -Y 1.95" />
<arg name="robot_name" value="ow5" />
</include>
<node name="static_transform_publisher" pkg="tf" type="static_transform_publisher"
args="0 0 0 0 0 0 world ow5_tf/world 100"/>
</group>
<!-- END ow5 robot-->
<!-- BEGIN camera_sensor robot-->
<group ns="sensor_stick">
<param name="tf_prefix" value="sensor_stick_tf" />
<include file="$(find sensor_stick)/launch/sensor_stick_spawn.launch" >
<arg name="init_pose" value="-x 0.5 -y 1.5 -z 0 ...
were you able to resolve this issue?, i am facing the same problem.