
How to apply a namespace to the tf topic?
I'm trying to set up two instances of the same robot arm. Both are supposed to be controlled by their own MoveIt move_group. I quickly managed to run all relevant nodes within a namespace per arm. However, the topic /tf remains outside of both namespaces. I suspect that is the reason, why my move_group ends up controlling both arms at the same time.
I came across tf_prefix(http://wiki.ros.org/geometry/Coordina...) which sounds like it would do exactly what I need. However, I could not figure out how to use it. Setting it as a ros param didn't do anything. Is that a MoveIt related issue?
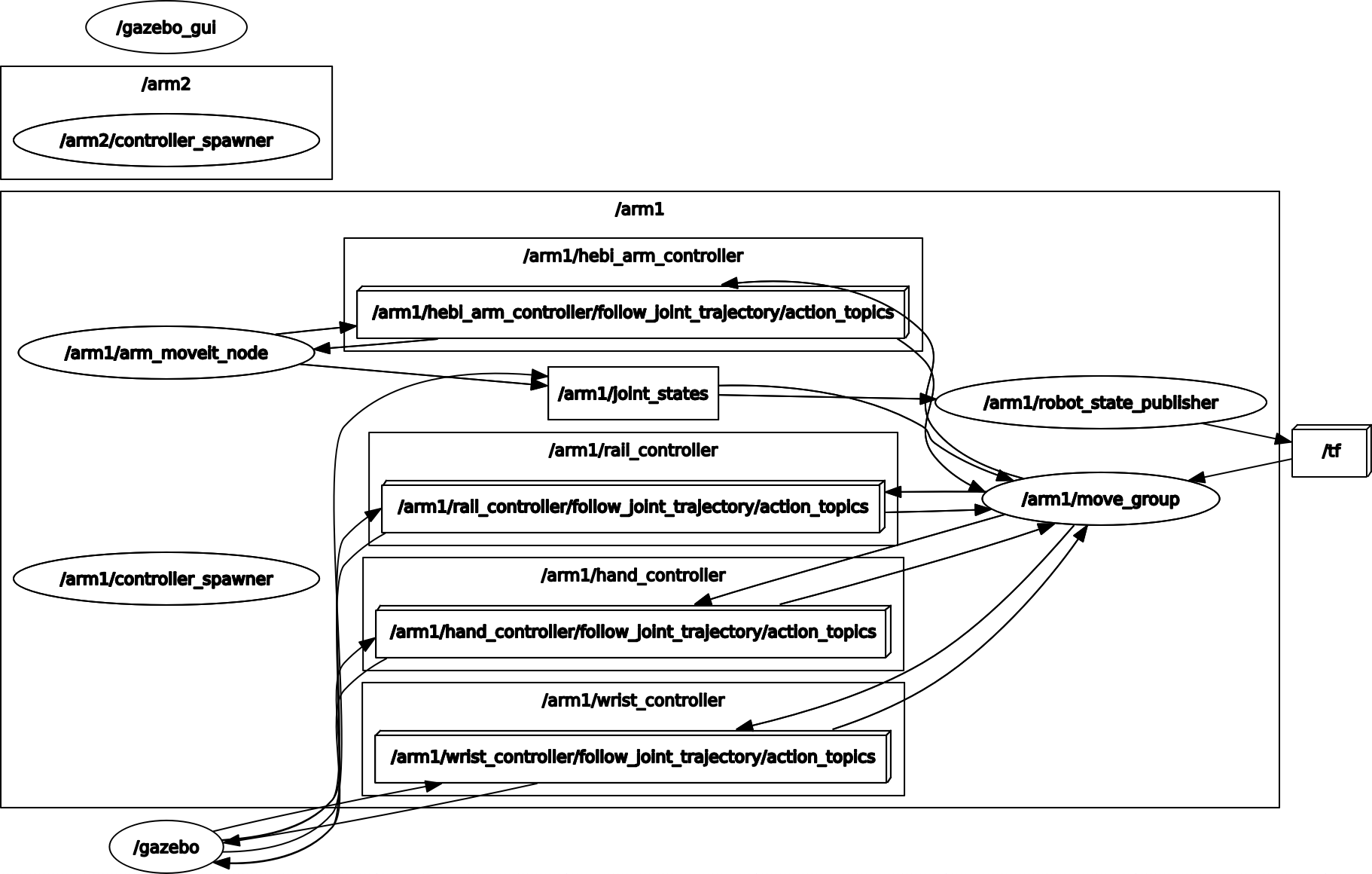
Below see the rqt_graph of my current situation. You can clearly see the box for /tf outside of the /arm1 namespace.
How can I resolve this?
Thanks!
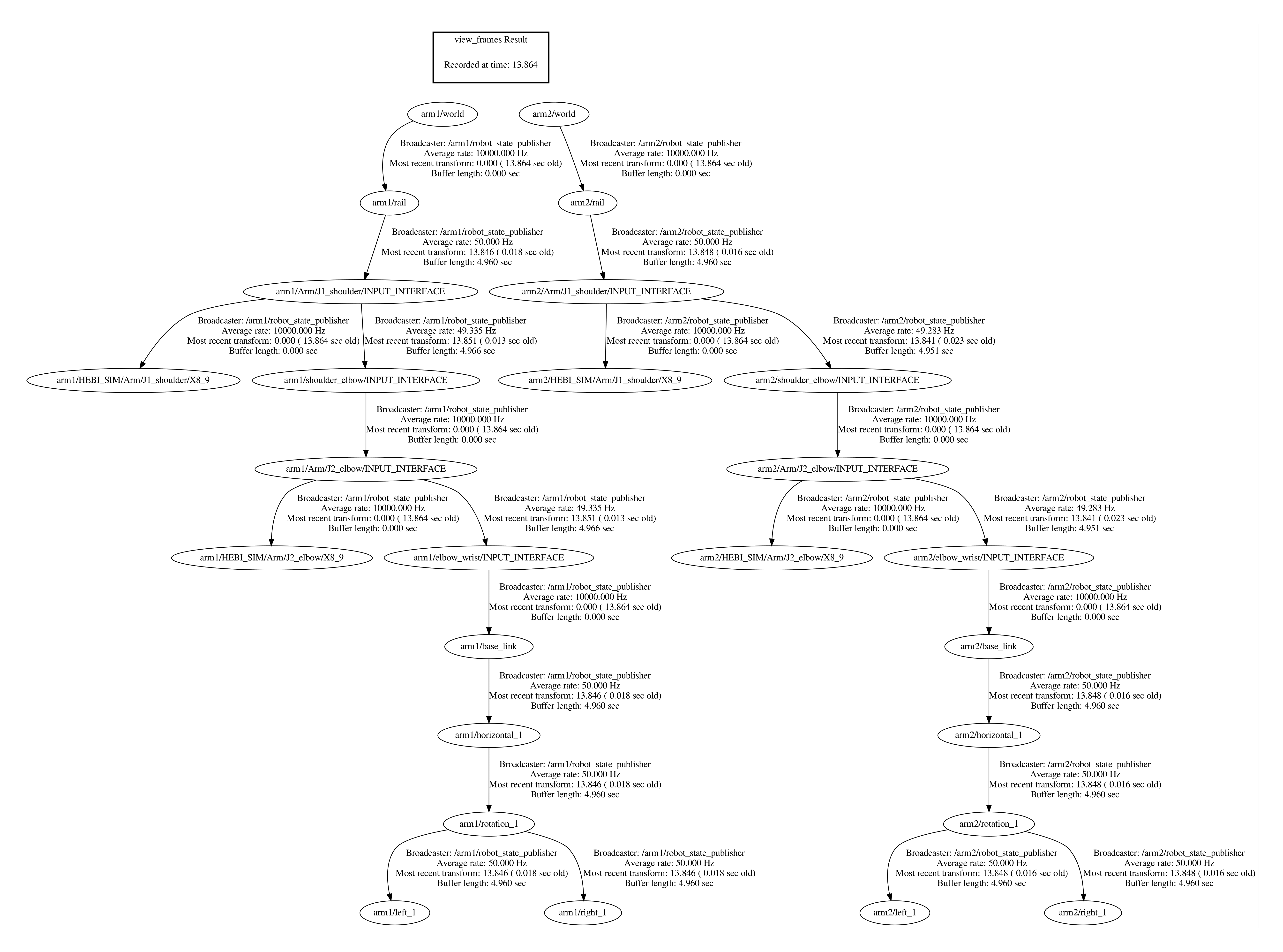

I would run the
rosrun tf view_framescommand and look at the pdf to check how everything is hooked up in your transform tree.