
How do I relocate the interactive marker to the tip of the needle?
Hi, i want to move the planner marker to the tip of the needle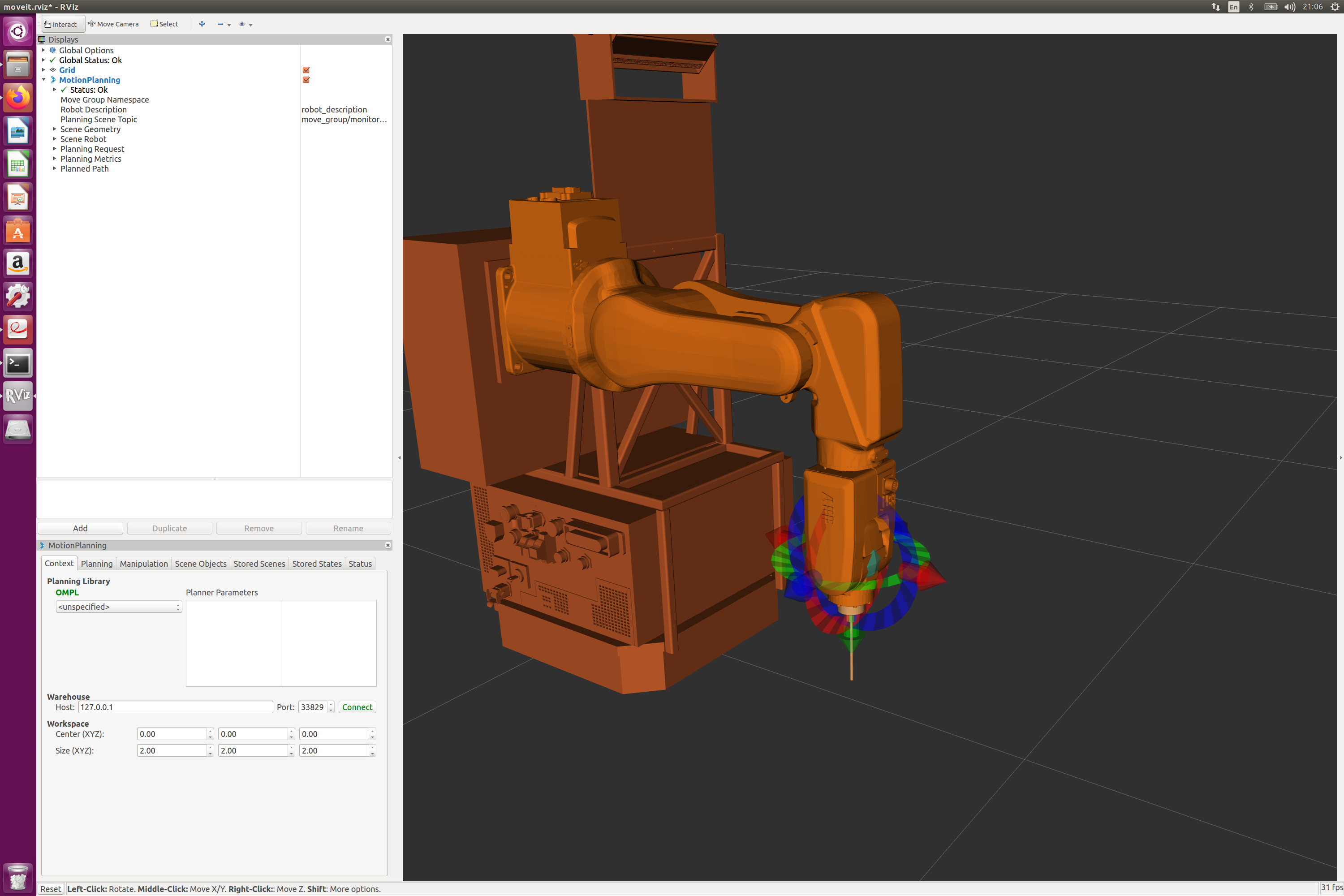
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Hi, i want to move the planner marker to the tip of the needle
At the moment, it looks like you have two options. For both of these you first need to define a link in your URDF at which you want the marker to be placed, e.g. your_robot_tool_point_link.
Define your robot planning group using a chain of links like this in the SRDF, and have no end effector for this group:
<group name="your_robot">
<joint name="your_robot_joint_1" />
<joint name="your_robot_joint_2" />
<joint name="your_robot_joint_3" />
<joint name="your_robot_joint_4" />
<joint name="your_robot_joint_5" />
<joint name="your_robot_joint_6" />
<chain base_link="your_robot_base_link" tip_link="your_robot_tool_point_link" />
</group>
The marker will be placed at the tip_link frame if no end effector has this group as its parent, or has one of the links set as its parent_link.
If you define an end effector group in your SRDF, the interactive marker will be placed at the parent_link, so you can write this:
<end_effector name="your_robot_ee_name" parent_link="your_robot_tool_point_link" group="your_robot_ee_group" parent_group="your_robot" />
If you want multiple interactive markers on your robot, you can define multiple end_effector tags that use the same your_robot_ee_group. If you don't have a group, you can define this hacky one, although you can't use this to plan:
<group name="your_robot_dummy_group">
<joint name="your_robot_joint_1" />
</group>
As Felix already pointed out, it is possible to have even multiple markers by defining multiple end_effectors:
<end_effector name="tool_mount" parent_link="tool_mount" group="hand" parent_group="arm"/>
<end_effector name="tool_tip" parent_link="tool_tip" group="hand" parent_group="arm"/>

Asked: 2020-04-29 08:08:17 -0600
Seen: 259 times
Last updated: May 14 '20
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
Quick comment: the coordinate planner is actually called an interactive marker. That may help finding documents/discussions/previous Q&As about it.
Would you have an idea of how to move this interactive marker to the tip of the needle?