
Inconsistent plot vs numerical data display in rqt_bag
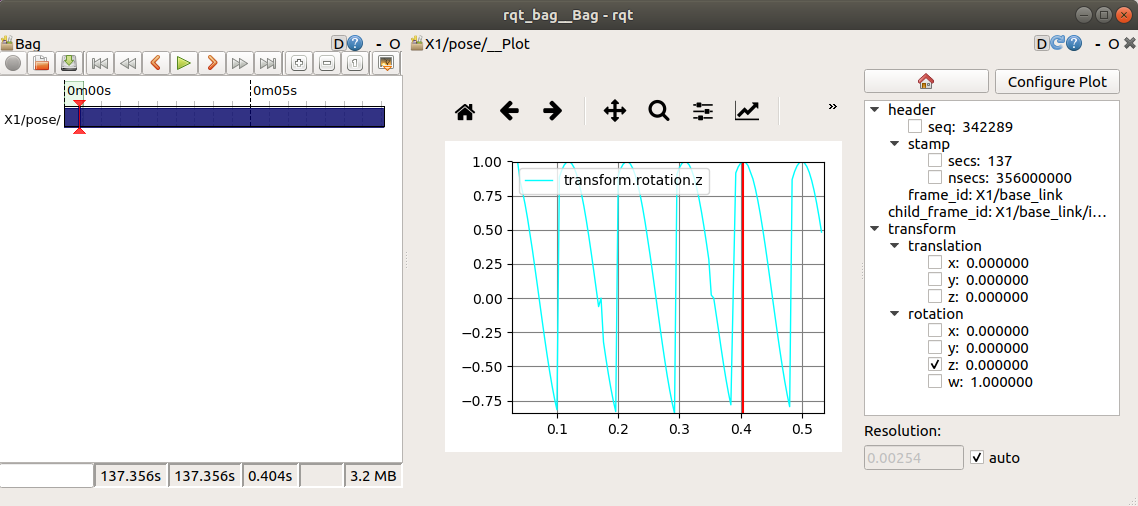
I'm running ROS Melodic on Ubuntu 18.04. When I visualize a rosbag with rqt, plotted data (z = 1.00) does not correspond to numerical values displayed in the right pane (z = 0.00). Here is the screenshot:


Please attach your screenshot directly to the question. I've given you sufficient karma.
@gvdhoorn Sorry for the delay, I didn't see your comment. BTW, when I leave Firefox tab with my question open,
Asked: 46 hours agoupdates automagically, butComments,Seen: 7 timesand other elements require manual page refresh.yes, it's a javascript based timer running client side.
AskBot does not use any event pushing, so a reload is necessary to refresh the page.