
Can't view lidar points in rviz.
Hi,
I try to view the lidar points in Rviz, and I tf broadcast topic /scan to /world. But I don't write a tf listener. Here is broadcaster.
#include <ros/ros.h>
#include <tf2/LinearMath/Quaternion.h>
#include <tf2_ros/transform_broadcaster.h>
#include <geometry_msgs/TransformStamped.h>
int main(int argc, char** argv){
ros::init(argc, argv, "lidar_tf");
ros::NodeHandle node;
static tf2_ros::TransformBroadcaster br;
ros::Rate r(100);
geometry_msgs::TransformStamped transformStamped;
transformStamped.header.stamp = ros::Time::now();
transformStamped.header.frame_id = "world";
transformStamped.child_frame_id = "scan";
transformStamped.transform.translation.x = -0.12;
transformStamped.transform.translation.y = -0.057;
transformStamped.transform.translation.z = 0.0101;
tf2::Quaternion q;
q.setRPY(1.6620416578885813e+00, 2.7298435352041510e-02,1.5608089396014240e+00);
transformStamped.transform.rotation.x = q.x();
transformStamped.transform.rotation.y = q.y();
transformStamped.transform.rotation.z = q.z();
transformStamped.transform.rotation.w = q.w();
while(node.ok()){
br.sendTransform(transformStamped);
}
return 0;
}
Here is what my rviz show.
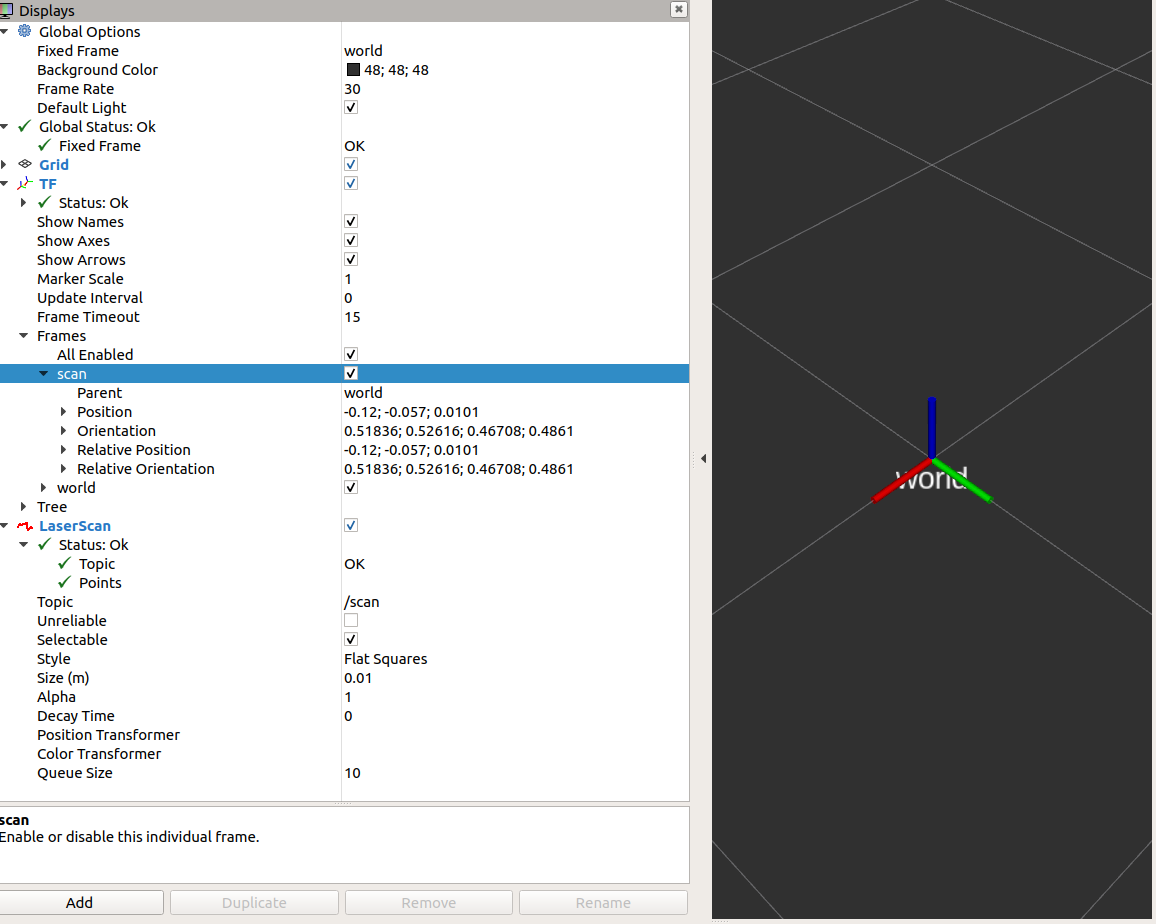
When I rostopic echo /scan, I do get the data.I am pretty sure /scan really return the data. However, I can't find scan points in rviz.
Could you please help to give any recommendation?

what happens if you change global options from
worldtoscan, do you see laserscan then ?It seems that something wrong in my broadcaster. Because when I turn off the broadcaster, and then I set Fixed frame as "scan", the lidar points show. Thank you for your recommendation.
you may consider to use
tf static_transform_publisher, if your LIDAR is fixed to the base which I think it should be. This could be frequency related,just a wild guess