
The gripper always collide to object when motion planning in moveit

Hello,
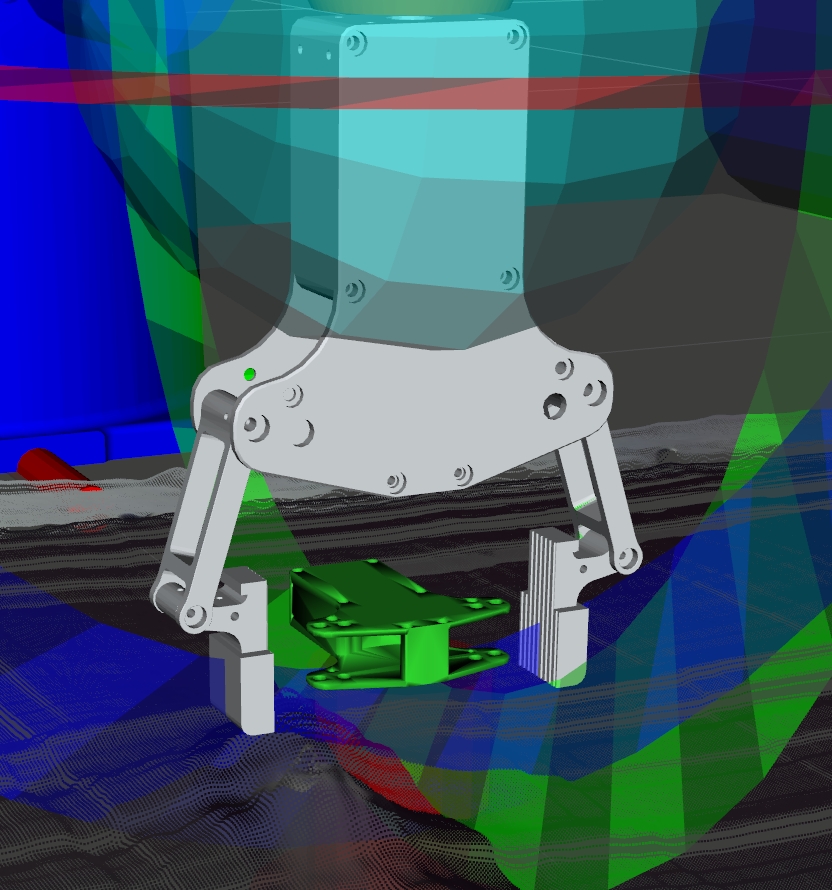
I tried to use moveit motion planning API to do picking and placing task. When I tried to approach my object, the planner always say it occur collision and failed.
[ INFO] [1572272017.376712612]: Planner configuration 'r1' will use planner 'geometric::RRTConnect'. Additional configuration parameters will be set when the planner is constructed.
[ INFO] [1572272017.376888070]: RRTConnect: Starting planning with 1 states already in datastructure
[ INFO] [1572272017.658415351]: Found a contact between 'mouse' (type 'Object') and 'r1_eef_base_link' (type 'Robot link'), which constitutes a collision. Contact information is not stored.
[ INFO] [1572272017.658472166]: Collision checking is considered complete (collision was found and 0 contacts are stored)
[ INFO] [1572272017.658563486]: Found a contact between 'mouse' (type 'Object') and 'r1_eef_base_link' (type 'Robot link'), which constitutes a collision. Contact information is not stored.
[ INFO] [1572272017.658579389]: Collision checking is considered complete (collision was found and 0 contacts are stored)
[ INFO] [1572272017.658679813]: Found a contact between 'mouse' (type 'Object') and 'r1_eef_base_link' (type 'Robot link'), which constitutes a collision. Contact information is not stored.
[ INFO] [1572272017.658691351]: Collision checking is considered complete (collision was found and 0 contacts are stored)
[ INFO] [1572272017.658775652]: Found a contact between 'mouse' (type 'Object') and 'r1_eef_base_link' (type 'Robot link'), which constitutes a collision. Contact information is not stored.
[ INFO] [1572272017.658786130]: Collision checking is considered complete (collision was found and 0 contacts are stored)
[ INFO] [1572272017.658872482]: Found a contact between 'mouse' (type 'Object') and 'r1_eef_base_link' (type 'Robot link'), which constitutes a collision. Contact information is not stored.
[ INFO] [1572272017.658882703]: Collision checking is considered complete (collision was found and 0 contacts are stored)
[ INFO] [1572272017.658969226]: Found a contact between 'mouse' (type 'Object') and 'r1_eef_base_link' (type 'Robot link'), which constitutes a collision. Contact information is not stored.
[ INFO] [1572272017.658979052]: Collision checking is considered complete (collision was found and 0 contacts are stored)
[ INFO] [1572272017.659074077]: Found a contact between 'mouse' (type 'Object') and 'r1_eef_base_link' (type 'Robot link'), which constitutes a collision. Contact information is not stored.
[ INFO] [1572272017.659084620]: Collision checking is considered complete (collision was found and 0 contacts are stored)
[ INFO] [1572272017.659162838]: Found a contact between 'mouse' (type 'Object') and 'r1_eef_base_link' (type 'Robot link'), which constitutes a collision. Contact information is not stored.
[ INFO] [1572272017.659174710]: Collision checking is considered complete (collision was found and 0 contacts are stored)
[ERROR] [1572272017.960710946]: RRTConnect: Unable to sample any valid states for goal tree
[ INFO] [1572272017.960748823]: RRTConnect: Created 1 states (1 start + 0 goal)
[ INFO] [1572272017.960764057]: No solution found after 0.583973 seconds
[ INFO] [1572272017.960788859]: Unable to solve the planning problem
I just use planner to let robot move down vertically by approaching distance.
However, it is normal at rviz interactive function.
Does anyone know how to deal with this situation? Thanks.
add a comment
