
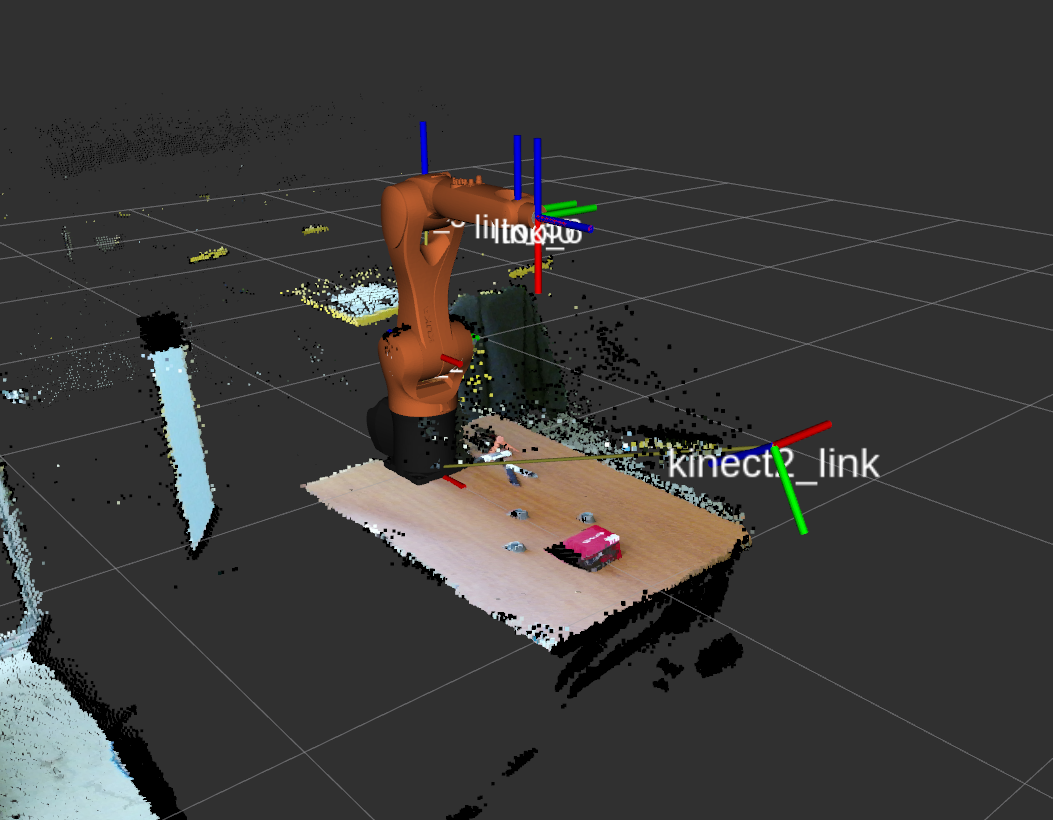
Kinect calibration a setting pose in Rviz
Hi, I am trying to make pick&place application using KUKA robot and Kinect One. I am using iai_kinect2 + libfreenect2 for getting pointcloud from Kinect into Rviz. So far I have been able to set position in respect of KUKA base_link using static_transform_publisher. I am not sure, that this was the proper way of doing it. My goal is to do extrinsic calibration, although I am unable to make OpenNi works so tutorials are not helpful in my case. Can you point me to the right direction or is it okay to use static_transform_publisher?
add a comment
