
Documentation on OpenPlanner (Autoware)
Hi all,
I was wondering if there is any documentation on using openplanner on autoware. I found the publication about open planner which explains the package itself in details but there is no instruction on how to use it, what nodes to launch and etc.
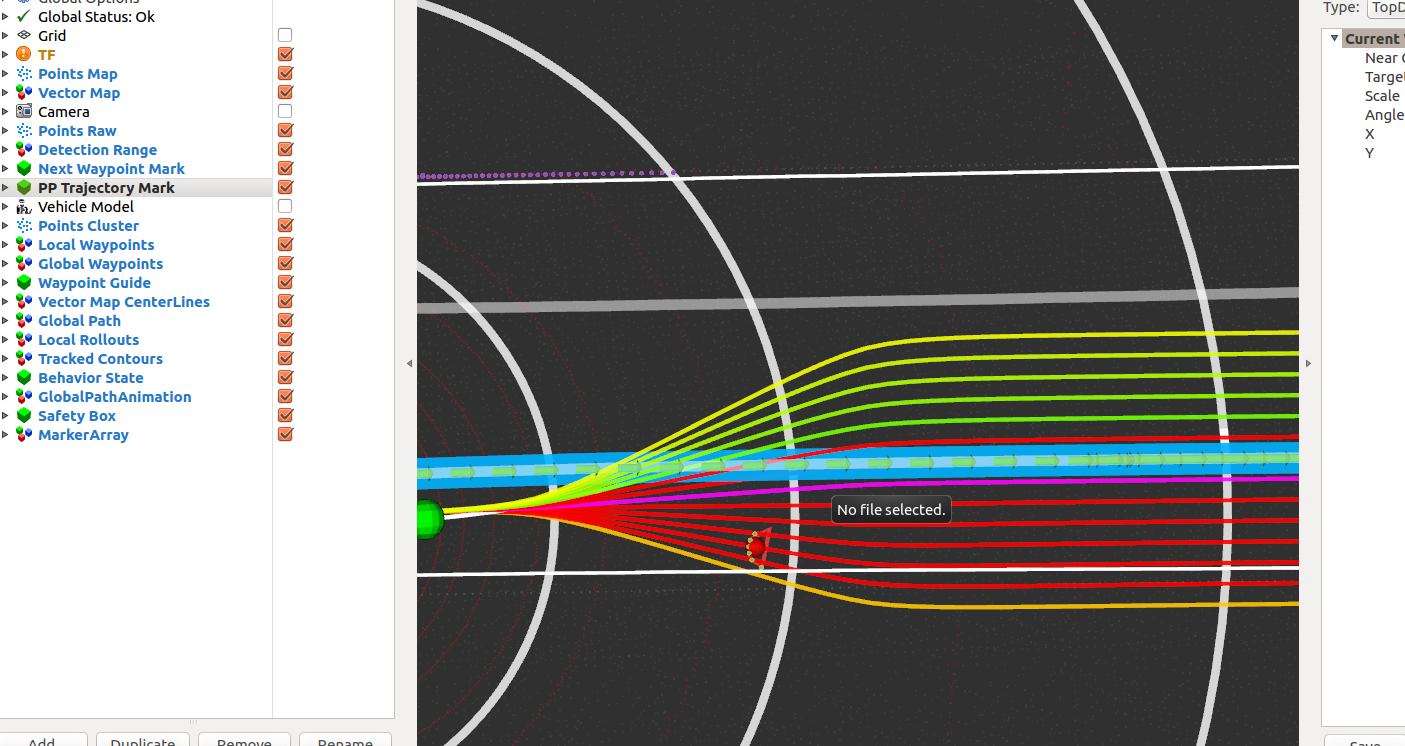
Update: This question is about detecting and using obstacle information in deciding on lane trajectories the vehicle should take.
With Obstacle:
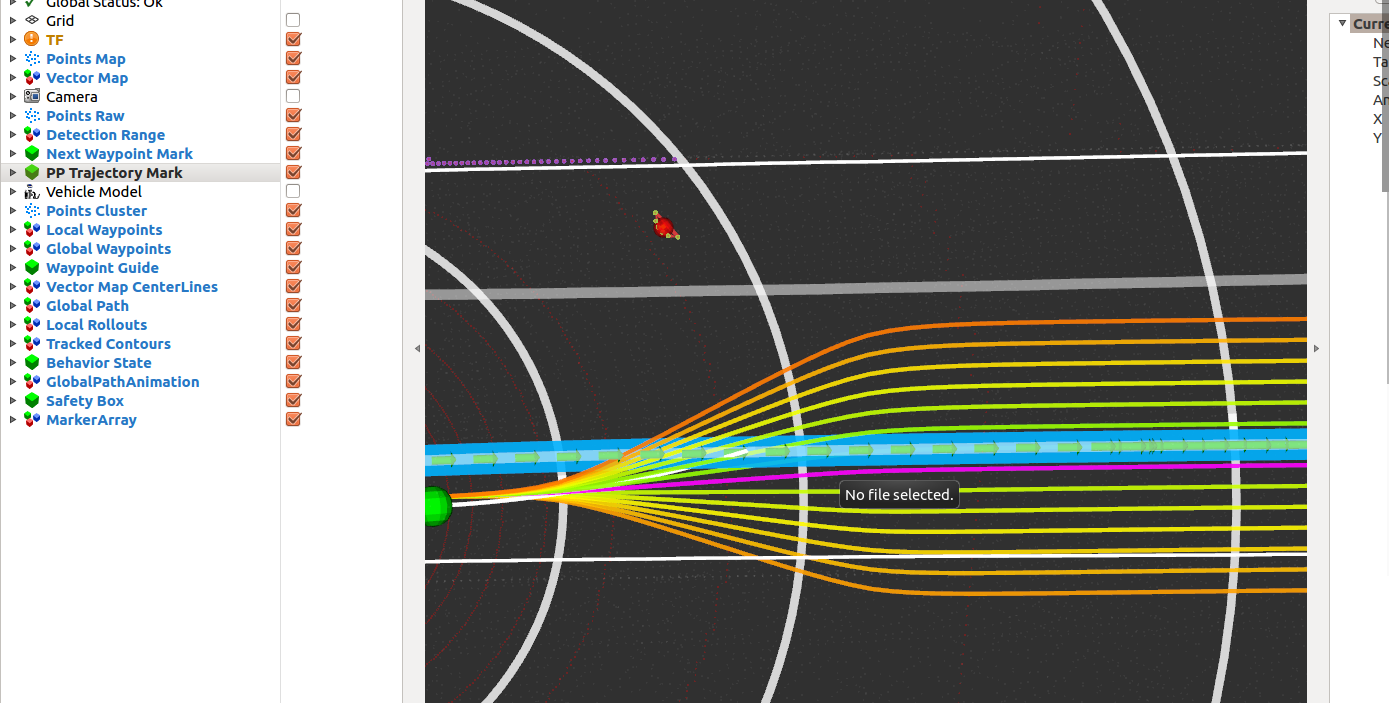
 No Obstacle:
No Obstacle:
 Thanks.
Cheers .
Thanks.
Cheers .
add a comment
