
How to add the map => odom tf to encoder coordinates
Hello,
I am just trying to analyse the accurancy of my robots localization in comparison to the simulation model (in the end I want to compare the simulation vs. real robot for odom, map position and perfect data from gazebo Modelstates). Right now, it was enough for me to get my location data from the encoder (or odometry). Now, due to some longer tests and longer distances, the robot moved away from its actual perfect location due to drifting etc.. That´s why I now try to visualize the differences between the odom, map and perfect data.
Here, I ran rosrun tf tf_echo map odom to see the difference between the coordinate systems with the follwing result:
At time 312.790
- Translation: [0.309, -0.188, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.001, 1.000]
in RPY (radian) [0.000, -0.000, 0.001]
in RPY (degree) [0.000, -0.000, 0.082]
Now I want to get that map-odom coordinates into my simulation. Is there an easy way to do that, if I already have the odom data, for example by just adding them?
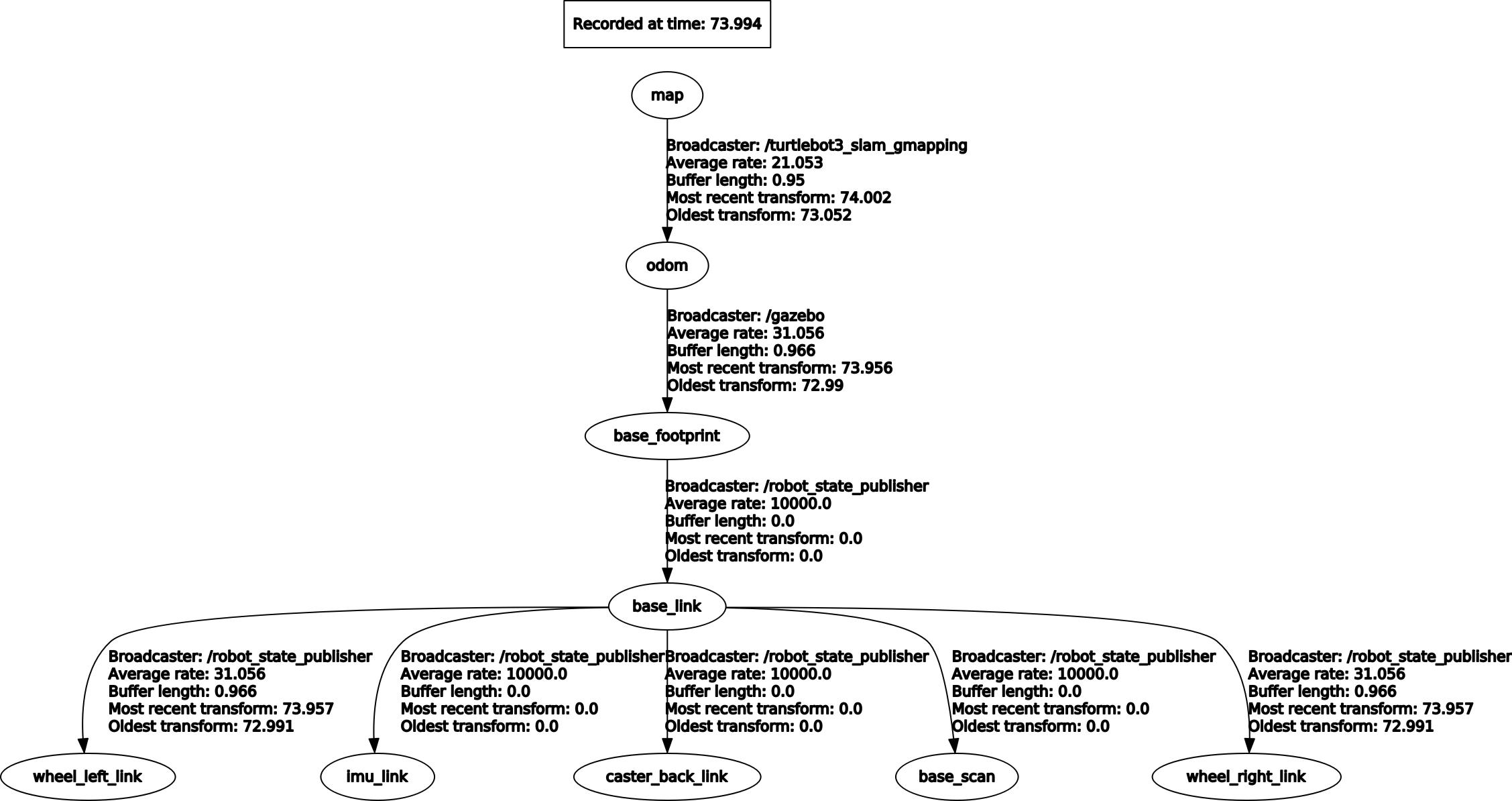
Here is a picture of my tf_tree: C:\fakepath\rqt_tf_tree_world.jpeg
Do I need to write an additional node, or can I get the map/odom information directly from the slam node into my localization node?
Thanks for your help!

{kind=link}