
About Topics and Namespaces
Hi all,
I'm new in ROS (I'm using Indigo and Ubuntu 16.04), so in order to start to manage ROS environments I have launched the dataset prepared for an algorithm that I have studied (concretely, SVO). But at this point, some doubts arise.
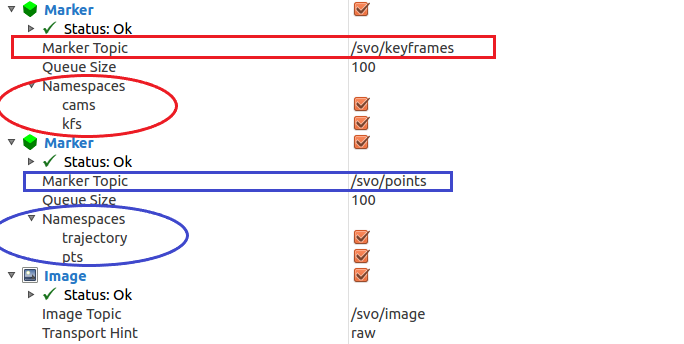
First of all, can one topic have differents kinds of messages? I explain it: I executed commands "rostopic echo /svo/keyframes" and "rostopic echo /svo/points" to see what is published in these topics. According to ROSwiki, tutorials I had seen, and my rqt_graph, I thougth that "svo" is the namespace; but in rviz appears the following fields (Namespaces looks like belong to topics...)
Does it mean that in the same topic ("/svo/points") are being published points from map and from trajectory?
Then, how could I see this in rostopic? Default info displayed is only about trajectory points
Same doubt for the the topic /svo/keyframes with cams and kfs namespaces
Thank you so much in advance! Hope anyone can clarify my confusion :)
Edit: Thank you very much for response! It's clearer now.
There you'd need to more details about the node you are using.
I tried to link a screenshot that showed my rviz settings, but I don't know why I did it wrong... so I am going to describe it with more details:
"svo" is a node which publishes in the topics "/svo/points" and "/svo/keyframes". I have 2 Markers to visualize these 2 topics in rviz, one for "/svo/points" and the other for "/svo/keyframes". Both of them, in their rviz Marker, have a dropdown field called 'Namespaces', with 2 options each. For example, in "/svo/points" appear namespace 'pts' (for points on the map) and namespace 'trajectory' (por points that recover the camera path). According to your reply, both ('pts' and 'trajectory') are published with same message format in "/svo/points" topic. Okey, I understand it. But when I execute rostopic echo command with this topic, the bash only displays info about points regardindg to 'trajectory' namespace.
So, my doubts are
- Are 'pts' and 'trayectory' a namespaces within "/svo/points" topic?
- How could I see info for 'pts' points with rostopic echo? (By default only displays info for 'trajectory' namespace)
I hope I have expressed myself better. Thanks again. BR.


Do not post updates as answers, unless you are answering your own question.
To add more information or to clarify something, edit your original question (using the
editbutton/link) or post a comment.Edit: I've also just given you sufficient karma to post your RViz screenshot. So please do so.
Sorry, I'll keep it in mind next time. Thanks.