
Stabilize the map => odom tf for localization
Hey ROS forum,
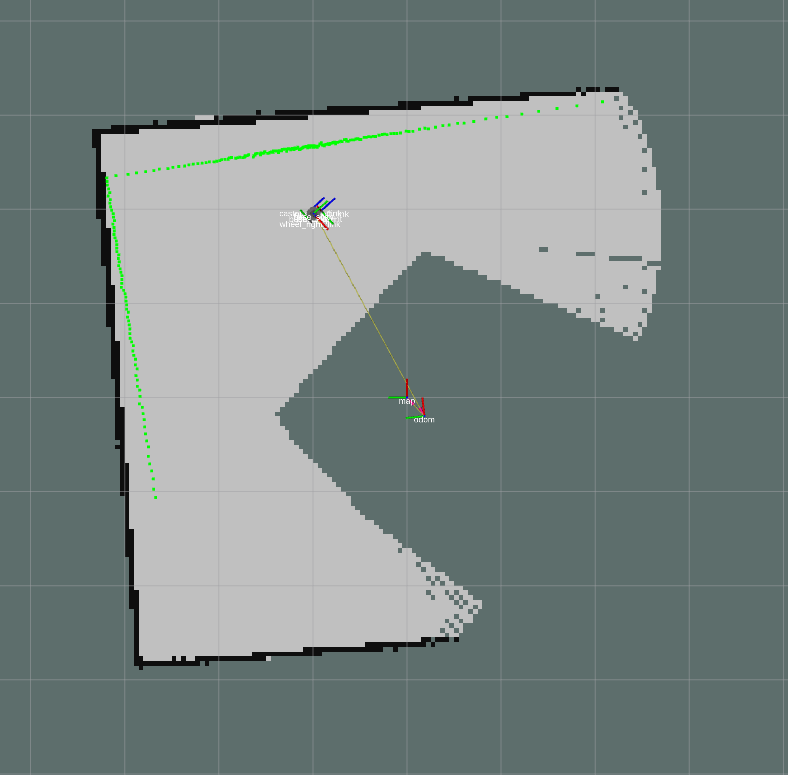
I just tried to add the tf transform to my robot to consider the map => odom transformation for better localization. Here, I use odom from the encoders, and the map data from the slam and gmapping. I had a look in RVIZ and I could see, that the odom system is jumping very hard in the map coordinates. The odom system should drift with time for sure, but big jumps are too much to get a good localization. Also the SLAM itself dosen´t work properly, the measured points differ much from the already located obstacles: C:\fakepath\slam_problem.png
One problem might be, that my robot always spawns to the center again if it crashes into a wall etc.. But I don´t know how to correct that problem.
Do you have an idea how to solve that problem or did you have similar situations?
Thanks in advance!


{kind=link}
I've tried using encoder odometry, and has given me bad results always. You could try using world odometry, that has given me decent results.
But don´t you get then perfect odometry data from the encoders? I try to make my localization to run as realistic as possible. That´s why I used the encoder odometry there. Thanks for your answer!