
ROS1 stop sending all messages for seconds
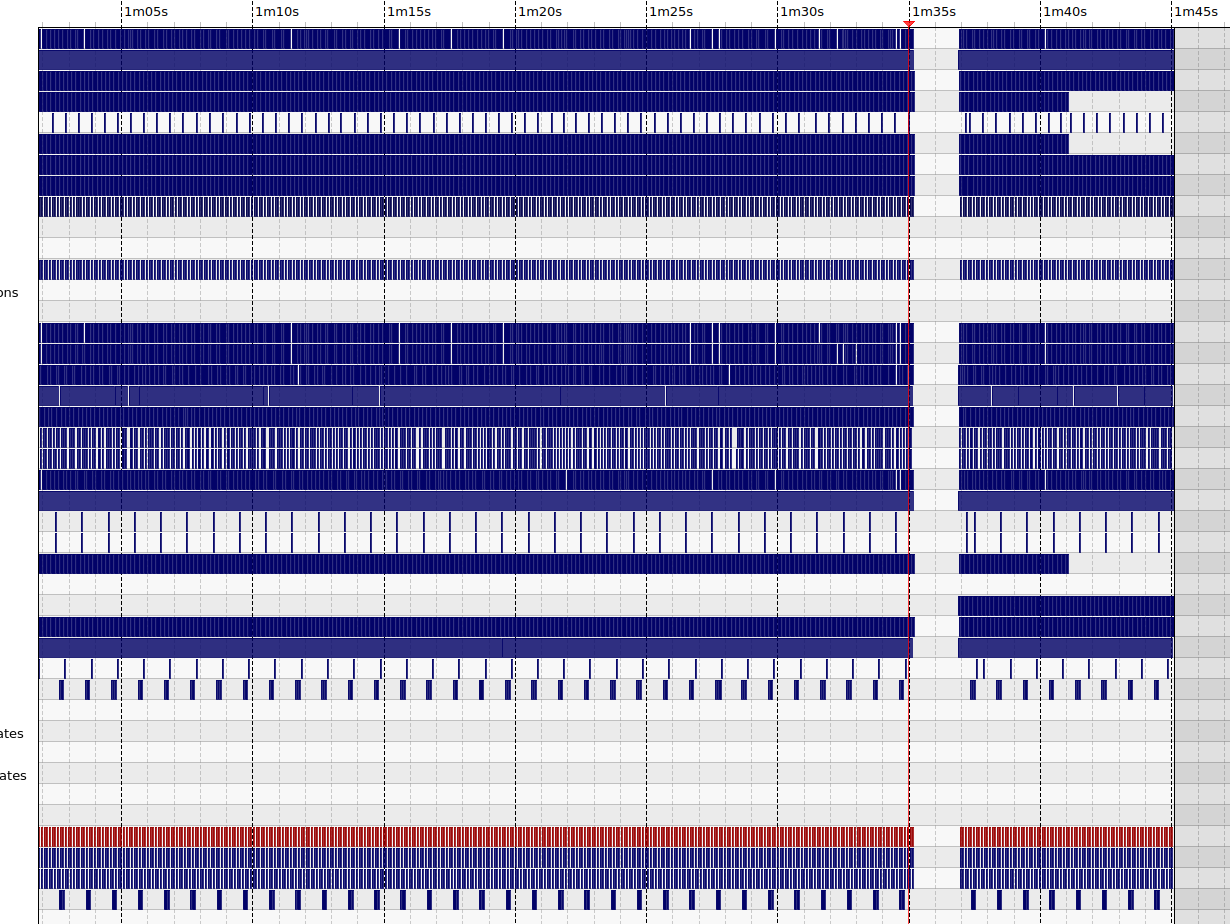
Image worth a thousand words. At arbitrary time all the messages in all topics are stop sending for ~2 sec. without apparent reason.
CPU loading at the moment was not highest - about 70% on few CPUs and 0% on others. After the gap, sending continued without delays as before. One observation: after the gap, header.seq for all messages continued normally without lose. E.g. for one message the last header.seq before gap was 1031 and the next one after gap was 1032 - nothing lost. So I don't think it's a rosbag problem. Most likely it's a ROS problem.
I understand it's barely possible to say exactly what happened. I'm rather looking for advice on how to investigate it and what direction to dig into here: what are possible reasons, what else to check?
Tech details: ROS1 Melodic, Ubuntu 18, Hardware: 8x3hz CPU + GPU + 18GB RAM

