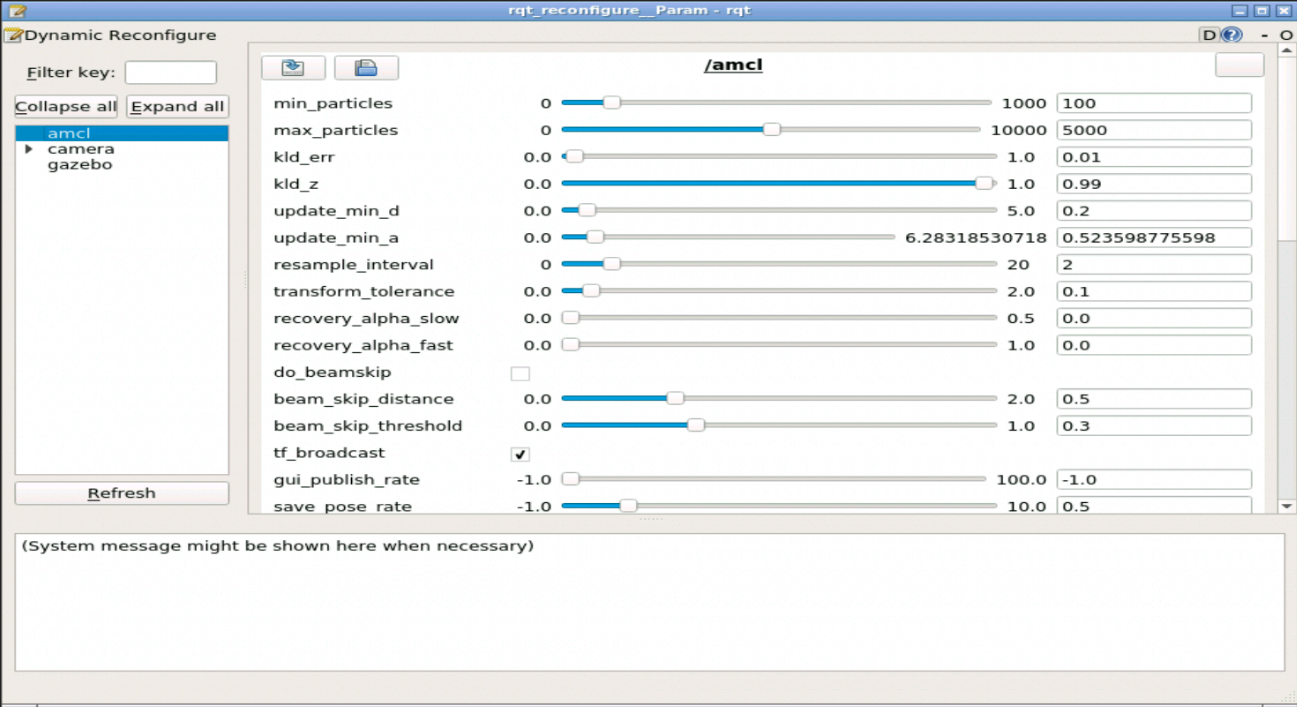
Dynamically Reconfigure AMCL Params

How is it possible to dynamically reconfigure AMCL params with the dynamic_reconfigure package? AMCL does not have a set_params service so the reconfigure node always times out waiting for it to be advertised and accomplishes nothing.
I hope this is a simple question to answer, thanks so much!
add a comment