
how to change robot's movemetns directions in the odometry frame
Hello,
I am trying to use the navigation stack into my project to add autonomous navigation capability to my robot.
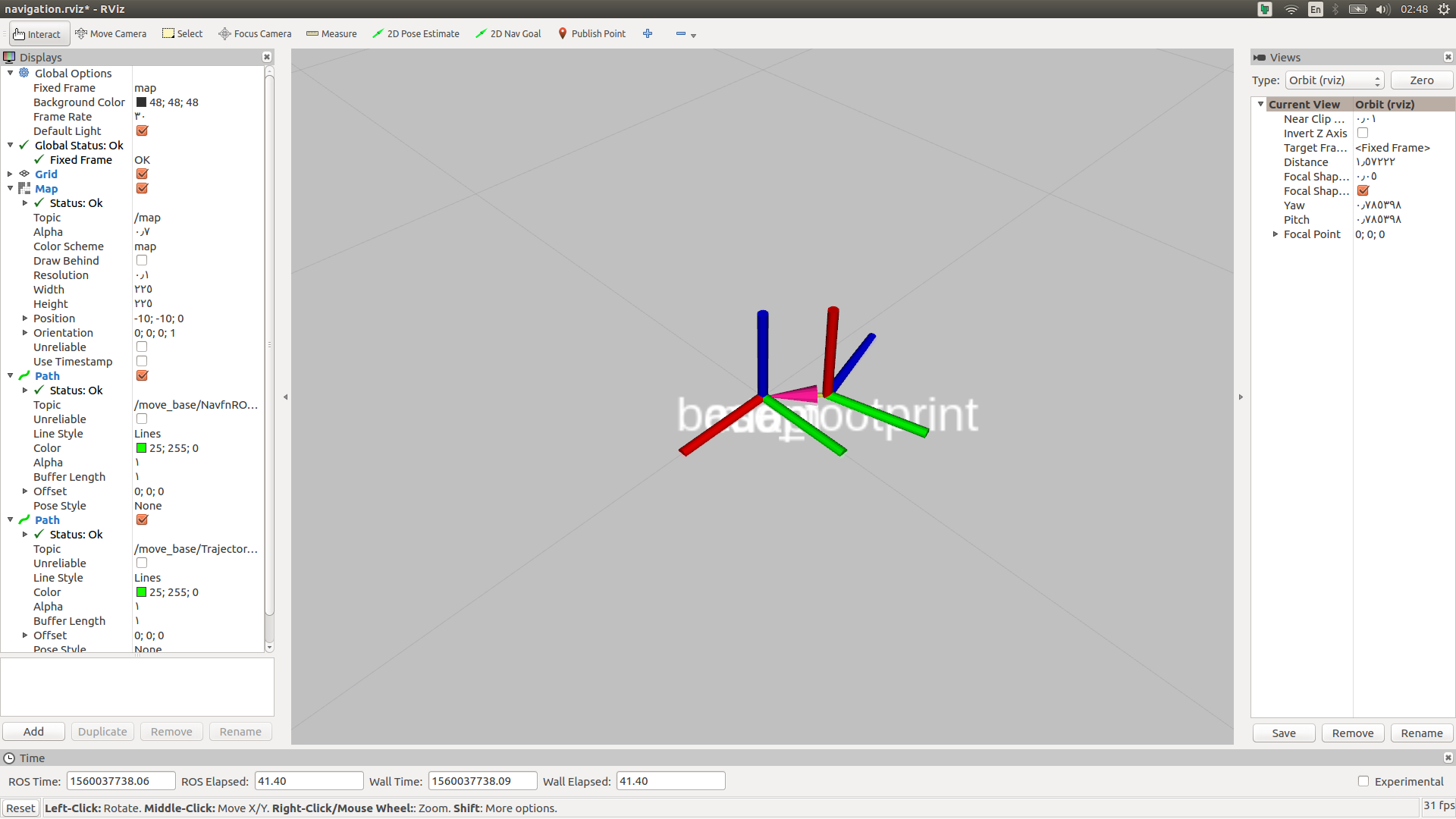
the xyz axis of my sensor is fixed in an orientation different than the odometry frame. the following pic shows both the odom frame and the base_footprint frame, what I want basically that if I moved in y axis of the base_footprint frame then I am moving forward according to the odom frame since the y axis of my sensor is facing forward on my robot.
I am using the following code to publish the odometry data over ROS
#!/usr/bin/env python
import math
from math import sin, cos, pi
import rospy
import tf
from nav_msgs.msg import Odometry
from sensor_msgs.msg import Imu
from geometry_msgs.msg import Point, Pose, Quaternion, Twist, Vector3
class odometry_publisher(object):
def __init__(self):
self.odom_pub = rospy.Publisher("odom", Odometry, queue_size=50)
self.odom_broadcaster = tf.TransformBroadcaster()
self.map_broadcaster = tf.TransformBroadcaster()
self.sub = rospy.Subscriber("/camera/odom/sample", Odometry, self.callback, queue_size=10)
self.x = 0.0
self.y = 0.0
self.th = 0.0
self.w = 0.0
self.vx = 0.0
self.vy = 0.0
self.vth = 0.0
self.qx = 0.0
self.qy = 0.0
self.current_time = rospy.Time.now()
self.last_time = rospy.Time.now()
self.r = rospy.Rate(100.0)
def callback(self,msg):
self.x = msg.pose.pose.position.x
self.y = msg.pose.pose.position.y
self.z = msg.pose.pose.position.z
self.vx = msg.twist.twist.linear.x
self.vy = msg.twist.twist.linear.y
self.vth = msg.twist.twist.angular.z
self.th = msg.pose.pose.orientation.z
self.w = msg.pose.pose.orientation.w
self.qx = msg.pose.pose.orientation.x
self.qy = msg.pose.pose.orientation.y
def publish(self):
while not rospy.is_shutdown():
self.current_time = rospy.Time.now()
# first, we'll publish the transform over tf
self.odom_broadcaster.sendTransform(
(self.x, self.y, 0.),
(self.qx,self.qy,self.th,self.w),
self.current_time,
"base_footprint",
"odom"
)
# next, we'll publish the odometry message over ROS
odom = Odometry()
odom.header.stamp = self.current_time
odom.header.frame_id = "odom"
# set the position
odom.pose.pose = Pose(Point(self.x, self.y, 0.), Quaternion(self.qx,self.qy,self.th,self.w))
# set the velocity
odom.child_frame_id = "base_footprint"
odom.twist.twist = Twist(Vector3(self.vx, self.vy, 0), Vector3(0, 0, self.vth))
# publish the message
self.odom_pub.publish(odom)
self.r.sleep()
if __name__ == '__main__':
rospy.init_node('odometry_publisher')
object__ = odometry_publisher()
object__.publish()
rospy.spin()
add a comment
