
URDF File - robot jumps and makes small leaps

Hello, I want to create a robot with two driving wheels and two caster wheels. As shown in this image :
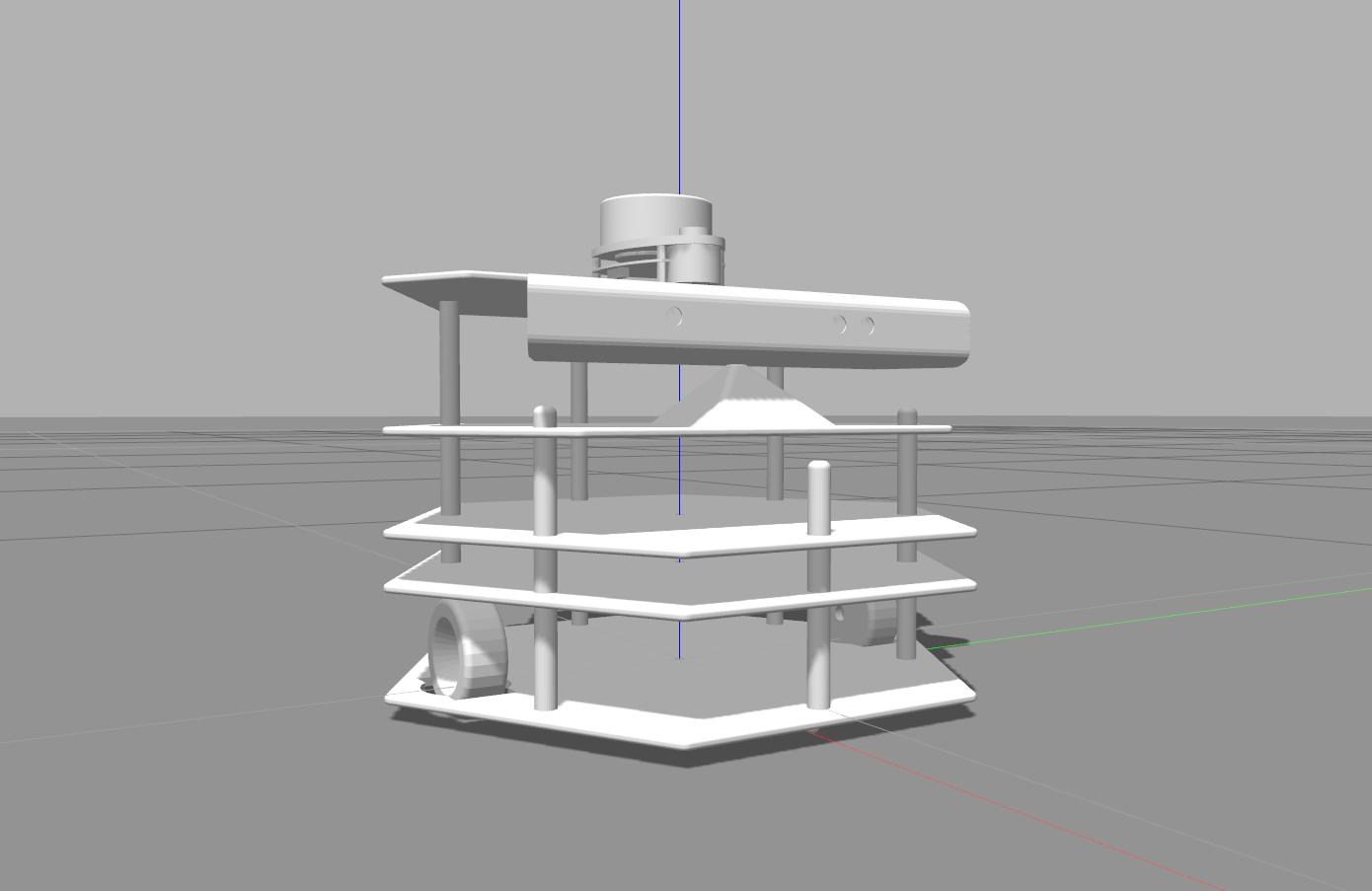
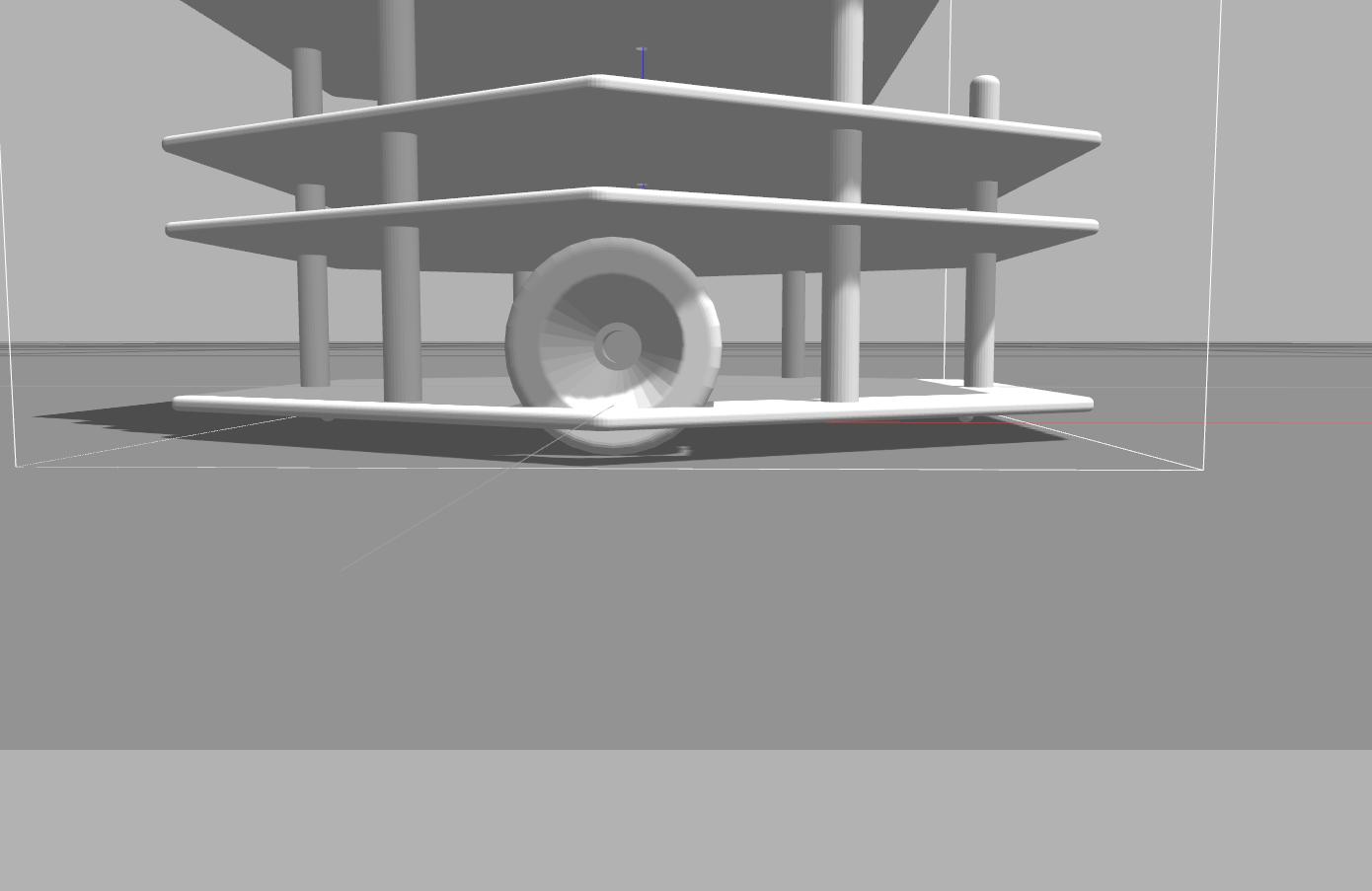
I d’not know if it is well showen in the picture, the robot has two caster wheels (front and rear).
I have create the URDF file that describes the robot, unfortunately I have some small problems that I do not know how to fix them.
URDF file link : https://gist.github.com/hdd-robot/2d3...
The problem is that the robot jumps and makes small leaps, which makes the odometry imprecise and it is very unpleasant.
Thanks in advance.

Please attach your images directly to the question. I've given you sufficient karma for that.