
How to make viso2_ros work with realsense r200?
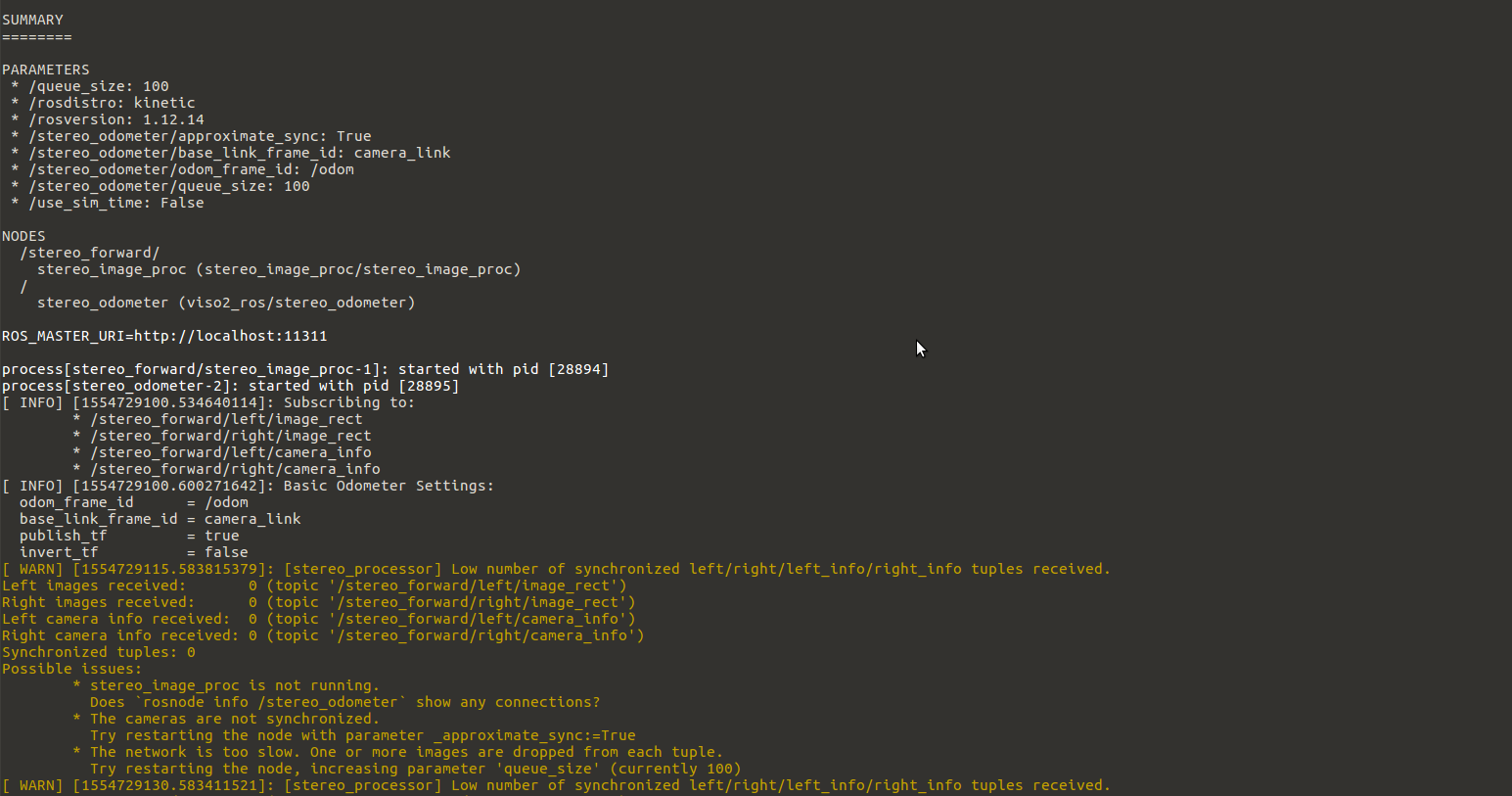
Hello, I have been trying to make viso2_ros work with intel realsense r200. But there is a problem with the synchronisation(I think) and viso2_ros is not getting any image data. I get the following warning:
Following is my launch file:
<launch>
<arg name="camera" default="stereo_forward"/> <node ns="$(arg camera)" pkg="stereo_image_proc" type="stereo_image_proc" name="stereo_image_proc"/> --> <node pkg="viso2_ros" type="stereo_odometer" name="stereo_odometer" output="screen">
<remap from ="stereo" to="$(arg camera)"/>
<remap from="image" to="image_rect"/>
<remap from="/$(arg camera)/left/image_rect" to="/camera/ir/image_raw"/>
<remap from="/$(arg camera)/left/camera_info" to="/camera/ir/camera_info"/>
<remap from="/$(arg camera)/right/image_rect" to="/camera/ir2/image_raw"/>
<remap from="/$(arg camera)/right/camera_info" to="/camera/ir2/camera_info"/>
<remap from="odom" to="/stereo_odometer/odometry"/>
<param name="queue_size" type="int" value="100"/>
<param name="approximate_sync" type="bool" value="true"/>
<param name="base_link_frame_id" value="$(arg camera)"/>
<param name="odom_frame_id" value="/odom"/>
</node>
</launch>
The rqt_graph:
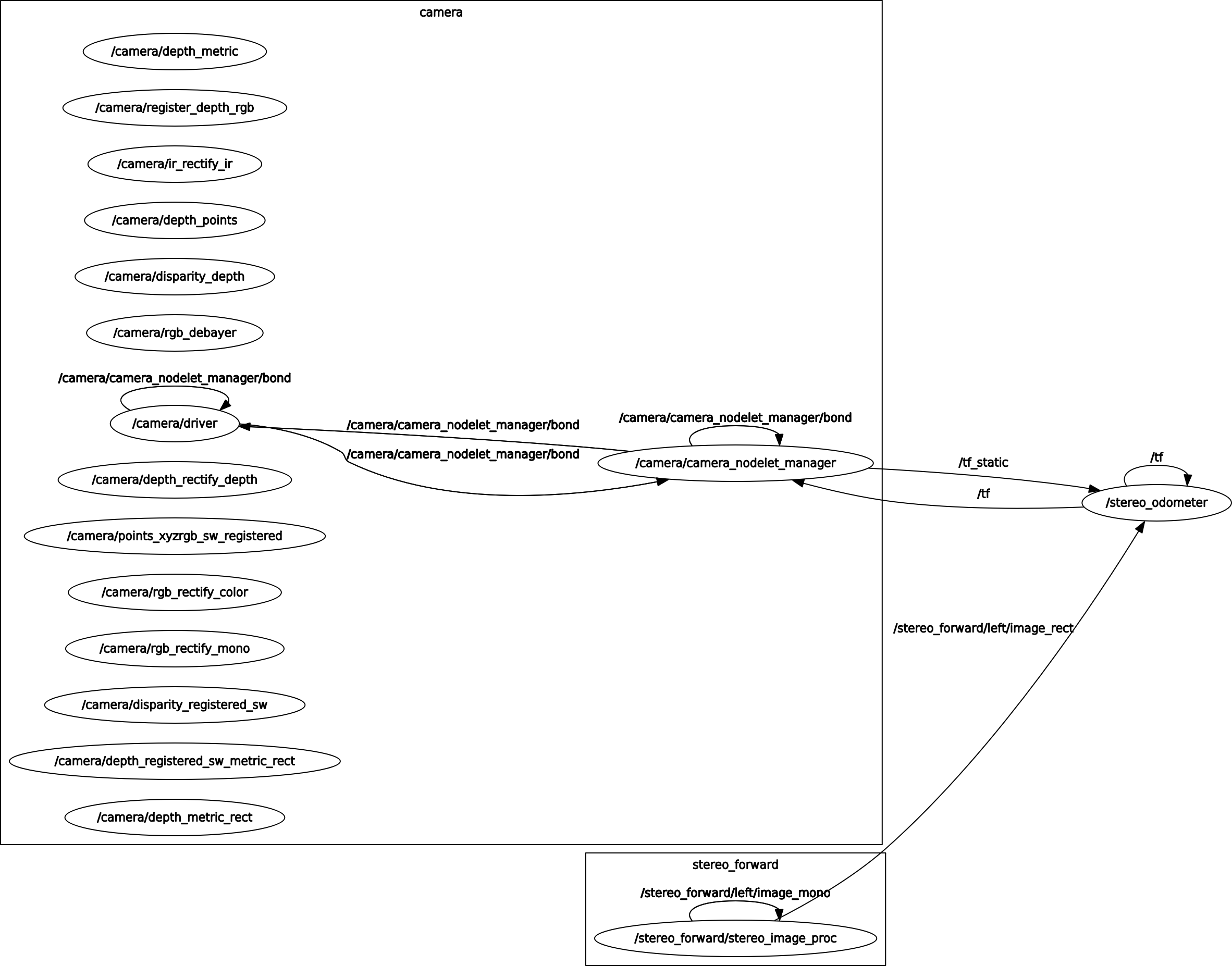
which does not show a connection for /stereo_forward/right/image_rect. I am using Ubuntu 16.04 with ROS Kinetic. If anyone has any idea or suggestion about a resolution, I would really appreciate that. Thanks in advance!
add a comment
