
How to tune mono visual odometry parameters of viso2_ros?
Hi everybody, I'm testing odometry accuracy of viso2_ros monocular vision. This is my system based on a differential drive:
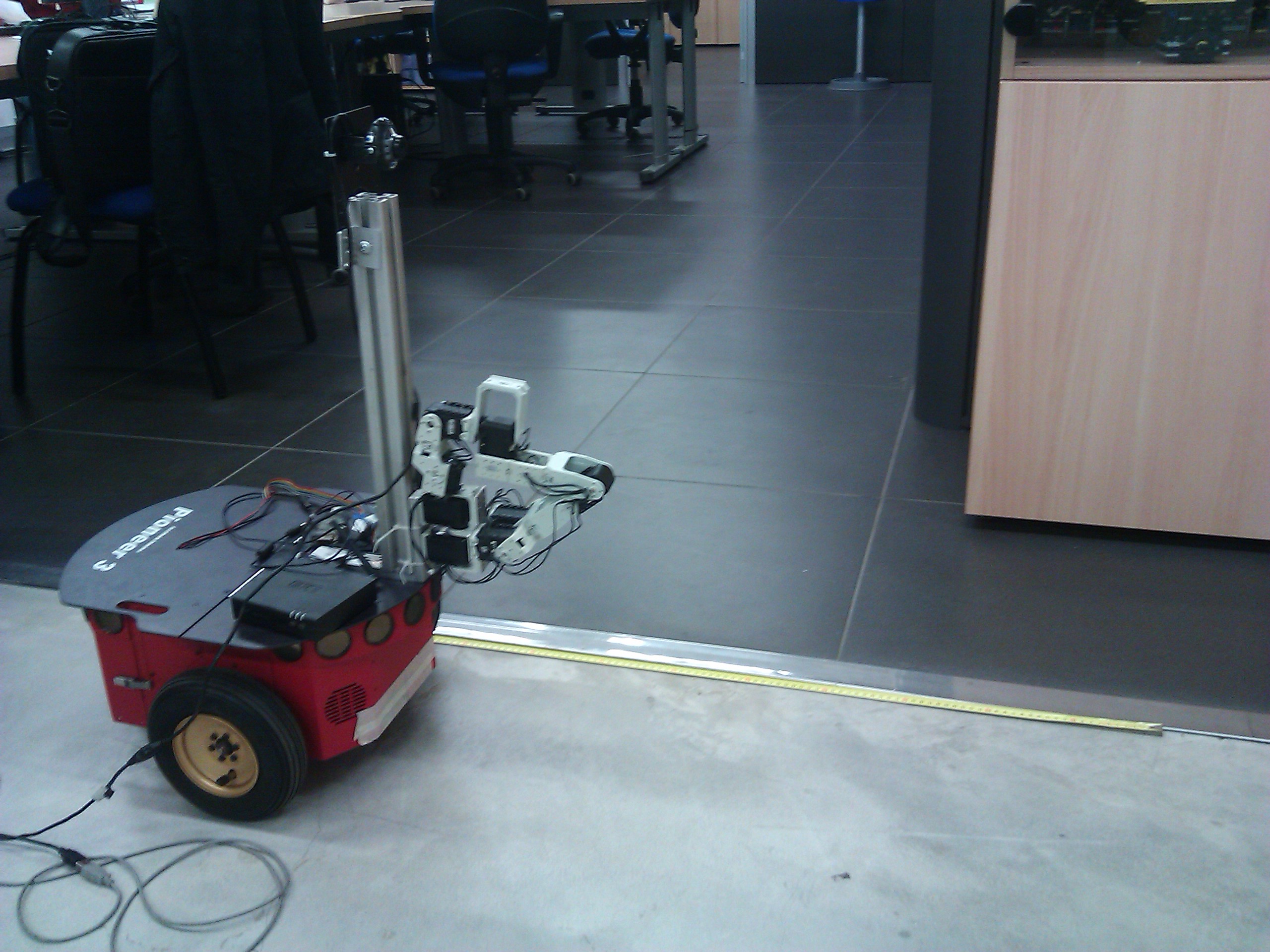
I tried to move the robot for one meter going to the straight direction and after I turned it on the right (90° around itself): http://www.youtube.com/watch?v=UMFbkt4-6s4
As you can see, viso2_ros monocular estimate 1.6626688201 meters along X direction instead of 1meter (see X position in console). In addiction to this, when I rotate it, it estimates a totally wrong position and orientation. My question is: how to tune all these parameters? I used the following:
Matcher parameters:
nms_n = 3
nms_tau = 50
match_binsize = 50
match_radius = 200
match_disp_tolerance = 2
outlier_disp_tolerance = 5
outlier_flow_tolerance = 5
multi_stage = 1
half_resolution = 1
refinement = 1
Bucketing parameters:
max_features = 2
bucket_width = 50
bucket_height = 50
Mono odometry parameters:
camera_height = 0.714
camera_pitch = 0
ransac_iters = 2000
inlier_threshold = 1e-05
motion_threshold = 100
I tried to set different values for inlier_threshold and motion_threshold without any success. Thankyou everybody.
add a comment

