
gazebo model embed in each other when contact [closed]
Hi,
I want to simulate a banana put in the bowl, the result is below:
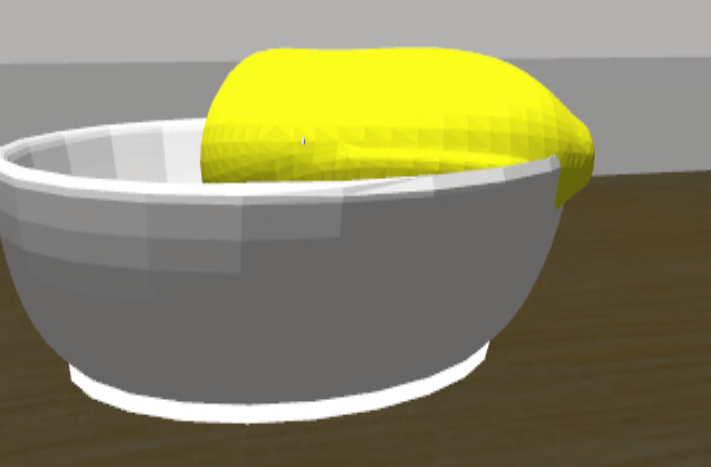
As you can see, The banana and bow embed in each other and the banana and bow will vibrate until the banana and bowl separate. The urdf of banana is below, the bowl is the model come with gazebo:
<?xml version="1.0" ?>
<robot name="Banana" xmlns:xacro="http://ros.org/wiki/xacro">
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<link name="virtual_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<joint name="virtual_joint" type="fixed">
<origin xyz="0 0 0" rpy="0 0 0" />
<parent link="virtual_link"/>
<child link="Banana" />
</joint>
<link
name="Banana">
<inertial>
<origin
xyz="0.0014177 4.15280000000162E-06 0.026526"
rpy="0.0 0.0 0.0" />
<mass
value="0.11082" />
<inertia
ixx="2.48347659000621E-04"
ixy="1.68484882757417E-05"
ixz="-1.05360215654521E-05"
iyy="0.000186690109925898E+01"
iyz="1.13501975389491E-07"
izz="0.000175609996584435E+01" />
</inertial>
<visual>
<origin xyz="0 0 0" rpy="1.5707963267949 0 0" />
<geometry>
<mesh
filename="package://object_description/meshes/Banana.STL" />
</geometry>
<material name="yellow" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.5707963267949 0 0" />
<geometry>
<mesh
filename="package://object_description/meshes/Banana.STL" />
</geometry>
<surface>
<friction>
<ode>
<mu>0.5</mu>
</ode>
</friction>
<contact>
<ode>
<min_depth>0.001</min_depth>
<kp>1e9</kp>
</ode>
</contact>
</surface>
</collision>
</link>
<gazebo reference="Banana">
<material>Gazebo/Yellow</material>
</gazebo>
</robot>
Can you provide some advice, thanks a lot!

You should post this over at http://answers.gazebosim.org/questions/ , since this is not a Gazebo and not a ROS problem. You will get better answers there.