
Different rates on Host and Embedded machines

I have a camera on my robot which is connected to ROS host via ROS_MASTER_URI and simply sends image messages via topic. The problem I have is the different frame rates that I see on both machines. The embedded ROS sends messages at 60 Hz but the ROS Host receives at different rate, around 10 Hz ! I synced both machines via commond google NTP server, for example chronyc tracking output on my Host:
Reference ID : D8EF2300 (time1.google.com)
Stratum : 2
Ref time (UTC) : Fri Mar 22 12:56:10 2019
System time : 0.001834574 seconds fast of NTP time
Last offset : +0.002976867 seconds
RMS offset : 0.059531696 seconds
Frequency : 8.683 ppm fast
Residual freq : +1.219 ppm
Skew : 191.000 ppm
Root delay : 0.038523011 seconds
Root dispersion : 0.023133269 seconds
Update interval : 65.3 seconds
Leap status : Normal
Can someone point me where I am doing wrong?
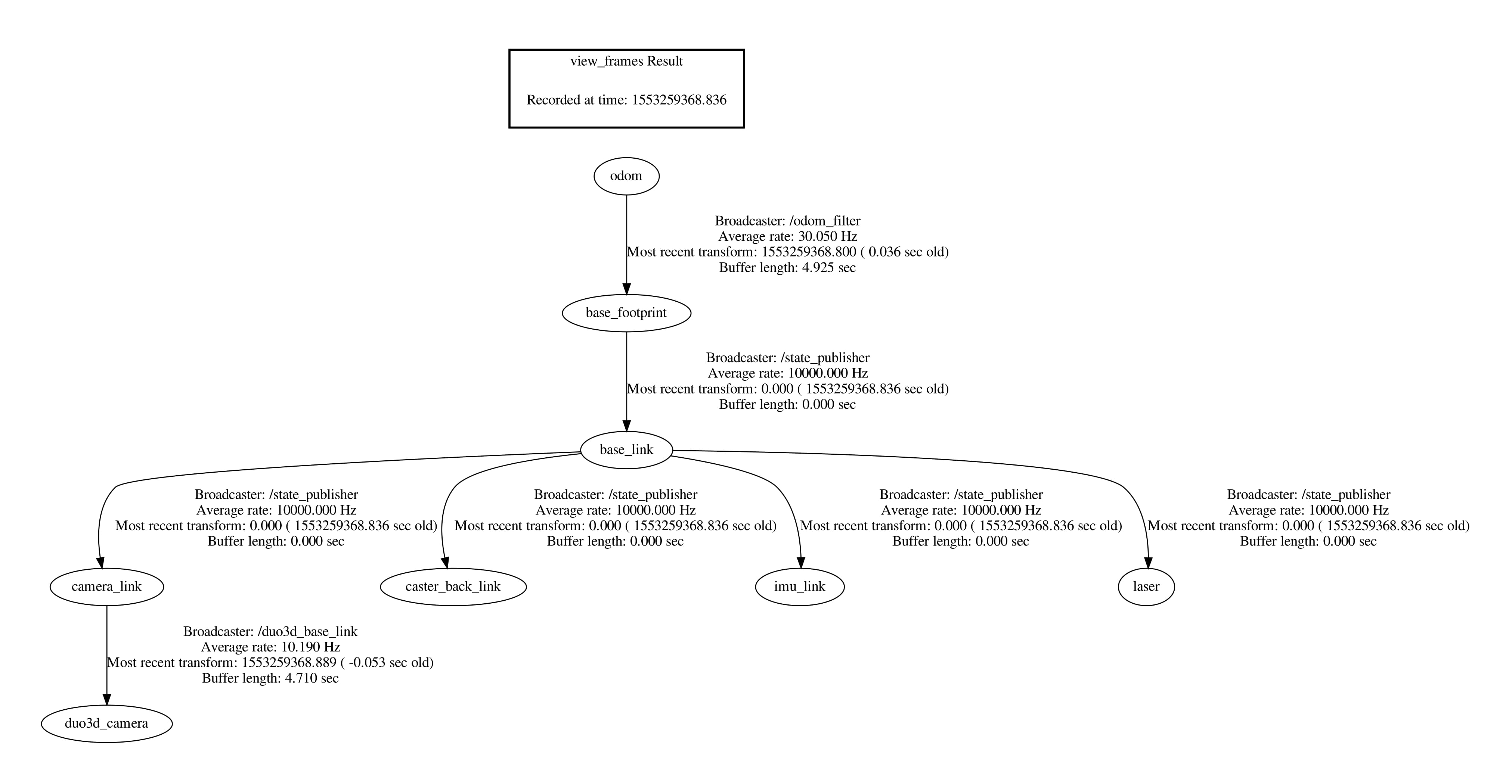
Also, here is my TF tree that I received from my Host machine:

What sort of camera are we talking about? Full HD, 60 FPS, 32bit colour without any compression would result in approx 474 MB/sec. Over wifi: this won't work. Over a gigabit LAN: could work, but is a lot of traffic and easy to lose msgs.
I'm not sure how chrony comes in here btw.
Re: TF tree: is the "around 10 Hz" you refer to based on the
10.190 Hzwe see in therqt_graphscreenshot for thecamera_link->duo3d_cameratransform?@gvdhoorn it is DUO3D Duo M camera. I do not think it has that amount of data. Is it?
Yes, and I have also done rostopic hz ... and if goes from 5 to 10 hz
@gvdhoorn there is actually an option to use compressed images, is that a better way to transmit image via wifi?
re: bw: I don't know. You'd have to check.
re: wifi: yes, compression would probably help (as it would with all bw limited communication channels). Btw: you are using wifi?
What is the output of
rostopic bwwith the topic that publishes the images?