
Moveit planning methods failing issue
I am attempting to use moveit and a combined transform tree of the ur5 and a turtlebot3 to get the ur5 to point at the turtlebot. I am successfully getting a pose from a transform-listener and simply trying to "go" to the provided pose.
It should be said I manually move the turtlebot from it's default location when gazebo has finished loading. Besides that, I just wait for my transform-listener to provide a pose and my ur5 to point at the turtlebot.
My problem is the system keeps generating errors with the following message:
************************* Transform Data:
[INFO] [1552288526.050124, 50.519000]: position:
x: 2.58791854443
y: -0.00185791163182
z: -1.08378970973
orientation:
x: -0.00443260913598
y: -0.70704209307
z: -0.707119016242
w: 0.00738427190731
[ INFO] [1552288526.275924743, 50.537000000]: Planning request received for MoveGroup action. Forwarding to planning pipeline.
[ INFO] [1552288526.276778939, 50.537000000]: Planner configuration 'ur5_bot[BiTRRT]' will use planner 'geometric::BiTRRT'. Additional configuration parameters will be set when the planner is constructed.
[ INFO] [1552288526.276895269, 50.537000000]: ur5_bot[BiTRRT]: No optimization objective specified. Defaulting to mechanical work minimization.
[ INFO] [1552288531.283686986, 50.838000000]: No solution found after 5.006749 seconds
[ INFO] [1552288531.326009432, 50.840000000]: Unable to solve the planning problem
[ WARN] [1552288531.328551294, 50.840000000]: Fail: ABORTED: No motion plan found. No execution attempted.
[ INFO] [1552288531.331262062, 50.840000000]: Execution request received
[ INFO] [1552288531.399526480, 50.845000000]: Completed trajectory execution with status SUCCEEDED ...
[ INFO] [1552288531.399637453, 50.845000000]: Execution completed: SUCCEEDED
[ INFO] [1552288531.400561743, 50.845000000]: Combined planning and execution request received for MoveGroup action. Forwarding to planning and execution pipeline.
[ INFO] [1552288531.400684103, 50.845000000]: Planning attempt 1 of at most 1
[ INFO] [1552288531.401456830, 50.845000000]: Planner configuration 'ur5_bot[BiTRRT]' will use planner 'geometric::BiTRRT'. Additional configuration parameters will be set when the planner is constructed.
[ INFO] [1552288531.401593129, 50.845000000]: ur5_bot[BiTRRT]: No optimization objective specified. Defaulting to mechanical work minimization.
[ERROR] [1552288536.402383780, 51.163000000]: ur5_bot[BiTRRT]: Goal tree has no valid states!
[ INFO] [1552288536.402458409, 51.163000000]: No solution found after 5.000813 seconds
[ INFO] [1552288536.524856189, 51.170000000]: Unable to solve the planning problem
[ INFO] [1552288536.527825361, 51.171000000]: ABORTED: No motion plan found. No execution attempted.
So, I have tried changing the planning method. I have literally gone down the list as found in RVIZ, shown below:
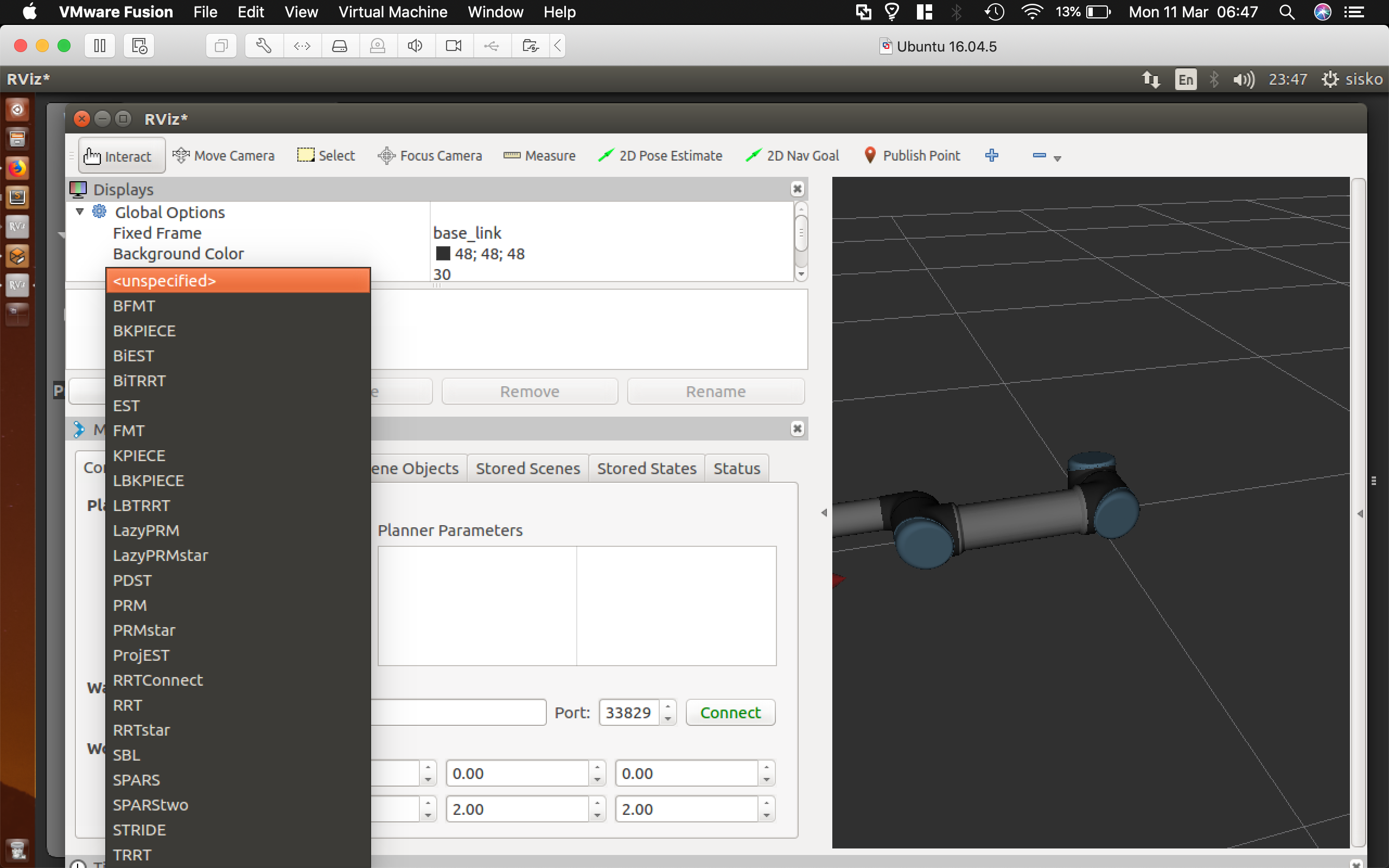
But, I keep getting the same (or similar) message and my ur5 fails to indicate the new location of the turtlebot. Below is a code snippet showing how I'm changing the motion plan:
class TrackBot():
def __init__(self):
rospy.loginfo("======== init responding")
# declarations
self.robot = moveit_commander.RobotCommander()
self.scene = moveit_commander.PlanningSceneInterface()
self.manipulator = moveit_commander.MoveGroupCommander('ur5_bot')
# self.manipulator.set_planner_id("SBLkConfigDefault")
# self.manipulator.set_planner_id("OMPL")
# self.manipulator.set_planner_id("BFMT")
# self.manipulator.set_planner_id("BKPIECE")
# self.manipulator.set_planner_id("BiEST")
self.manipulator.set_planner_id("BiTRRT")
.
.
.
.
.
I need help please. Not sure how to resolve this.
UPDATE (adding some code):
def transform(self):
# -----------------------------------------------
tf_buffer = tf2_ros.Buffer()
self.tf_listener = tf2_ros.TransformListener(tf_buffer)
rospy.sleep(1) # wait for the ...