
tf lookupTransform sigabrt

hi,
i want to get the transformation between my /map and /robot_0/base_link. I am currentry trying it with:
tf::TransformListener listener;
tf::StampedTransform transform;
listener.lookupTransform("/map",
"/robot_0/base_link",
ros::Time(0),
transform);
but i always get a SIGABRT.
What I am doing wrong ?
my tf tree: 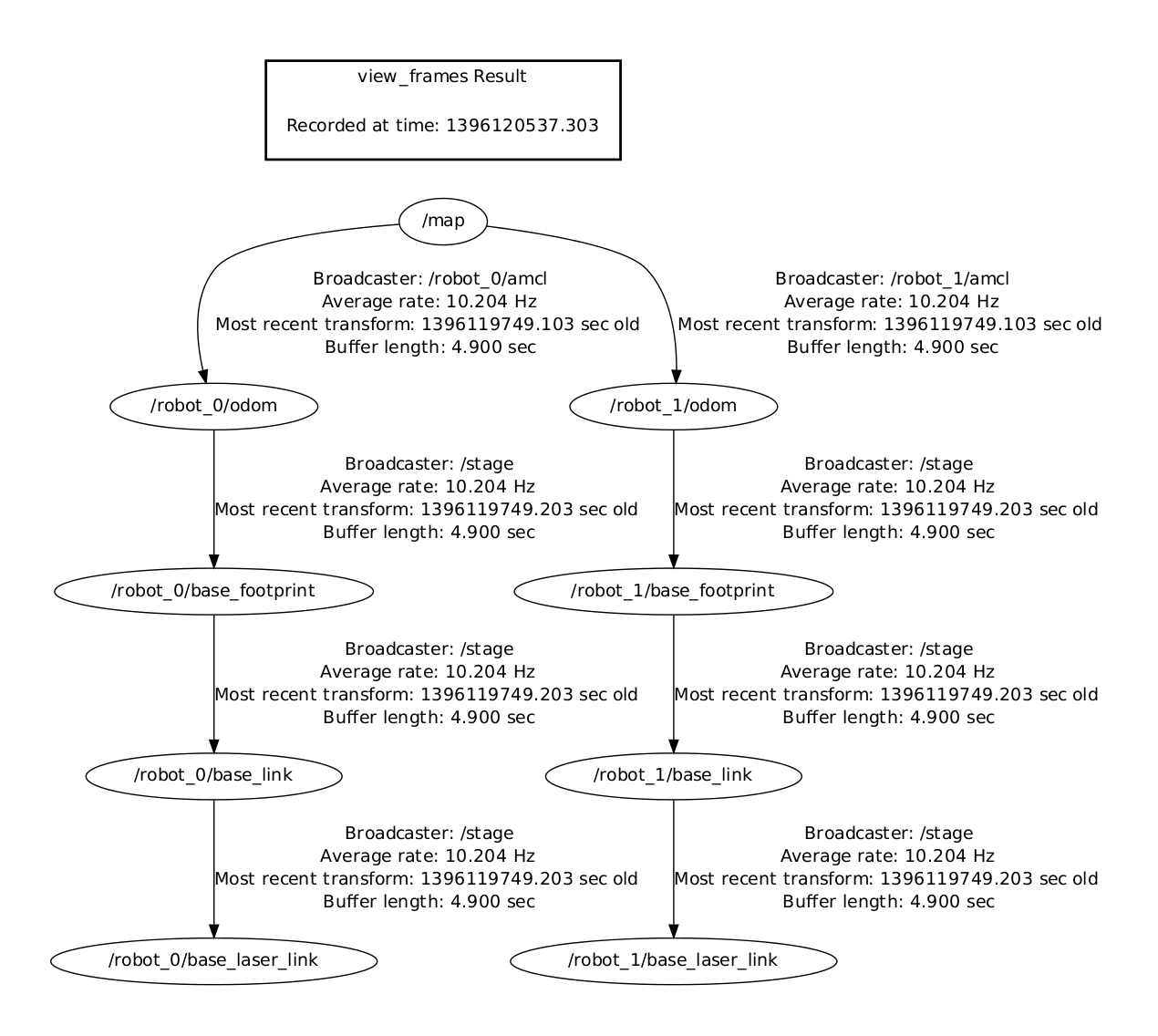
regards,
Edit:
i get the following Error message:
 Peter
Peter
add a comment
