
husky SLAM demo produces bad map
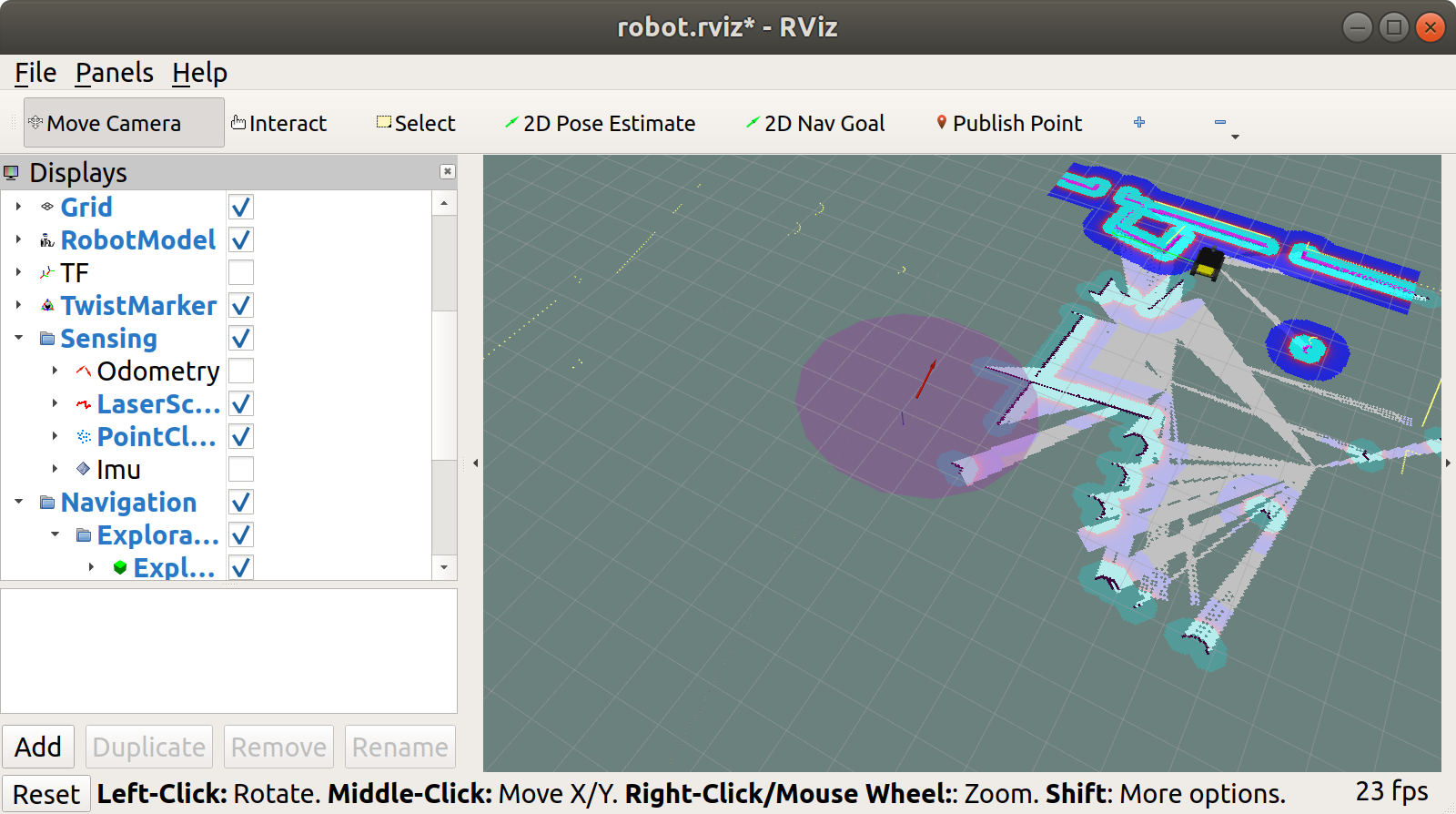
When I run the Husky gmapping/SLAM demo, the resulting map is terrible. It's piecey, not completely filling in the clear space, and the vehicle immediately accrues a lot of drift in its pose estimation. So the map looks totally haywire, as you can see below. Note the map alignment error too: in the upper left hand/middle corner you can see the scan of the circles, which have been mapped in the lower right.
The only hint I have to go off of is maybe it's related to this error I get when gazebo loads (which I get for all 4 wheels):
[ERROR] [1552009842.749406803, 1298.710000000]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/front_left_wheel
However, when I publish commands to cmd_vel and watch how the scans align, they look fine, so it doesn't really seem like odometry is the problem. Has anyone else encountered and resolved this issue with Husky gmapping?
Edit: Ran the gmapping demo and drove the husky into a wall and it does not seem to recognize that it is no longer moving, since it keeps mapping the wall in a new place:
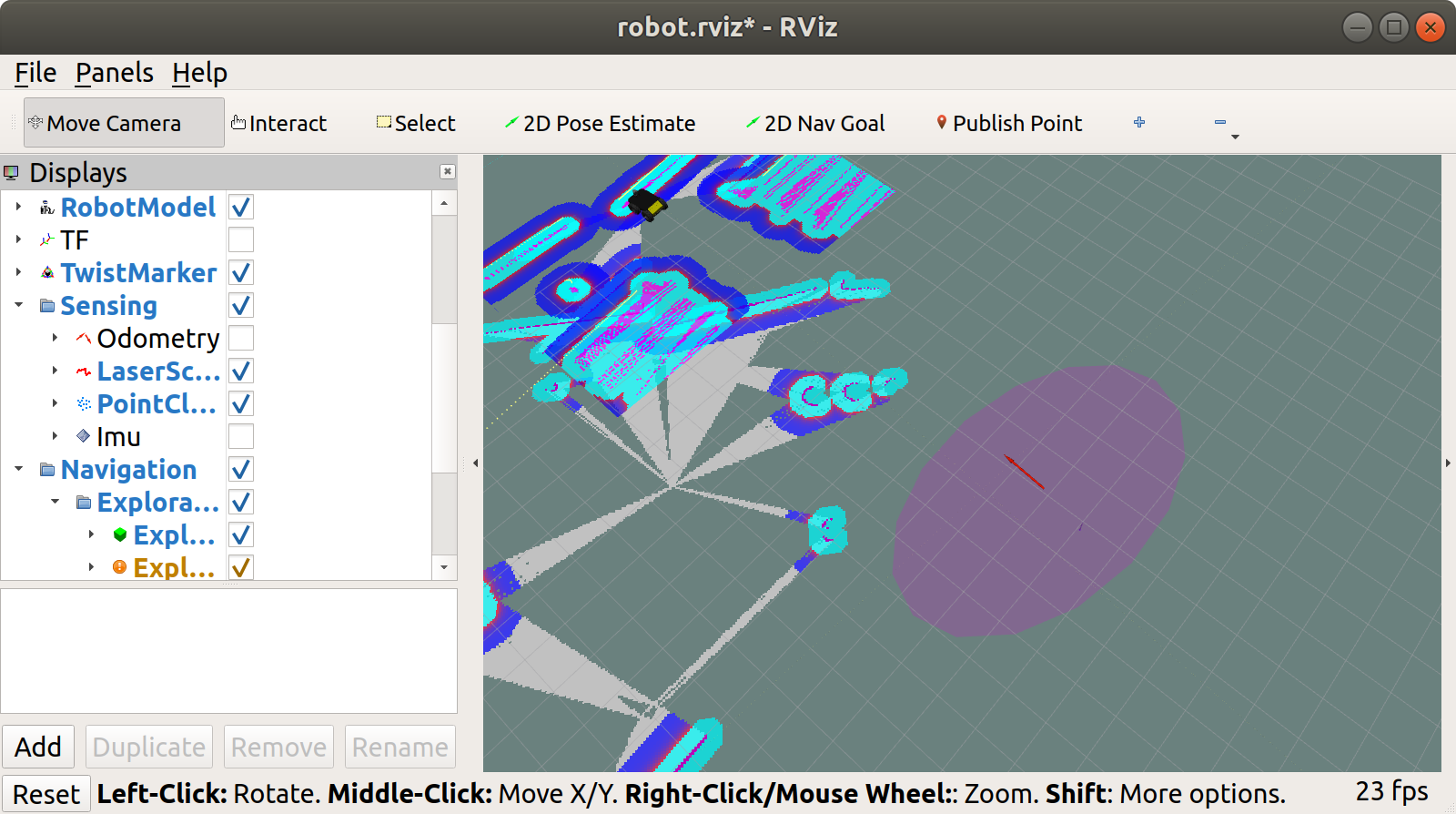
So it seems like the error mentioned above really could be the problem. I'm fairly new to ROS and I've been trying to figure out where to specify the p gain, but it's not clear. Anyone else know how to specify it?
BTW, running ROS Melodic on Ubuntu 18.04.

I've bumped your karma, so you should be able to upload images now.
thanks!! uploaded the image
It works perfectly with ROS kinetic, but I have the same problem with ROS melodic packages, the map is a big mess. Did you ever solve this? any updates?
I am facing the same problem, this occurs when I use gazebo_ros_control plugin, when I use differential_drive_controller instead, the map is created correctly but the robot is not stable, you can check my problem and images (in comment) here: https://answers.ros.org/question/3286...
And please let me know if you have found a solution by using the plugin gazebo_ros_control plugin.
Thanks.
Thank you for your feedback @Youssef_Lah , I was doubting the
gazebo_ros_controlplugin as well because I encountered the same problem with my custom robot and I'm using the same plugin in its control. I will keep you updated if I understand what's going on with it.