
What is the /move_group/sense_for_plan/max_look_attempts param?
System: Ubuntu 16.04 / ROS Kinetic / Nuvo-5095GC-022 / Universal Robots UR10 Packages: freenect_stack, geometry2, libfreenect, perception_pcl, trac_ik, universal_robot, ur_modern_driver, rqt
I've been looking at rqt in more depth and today stumbled across the dynamic reconfigure functionality. Under the move_group tab, it's possible to dynamically change a parameter called max_look_attempts that i haven't seen before. The gui looks like the below:
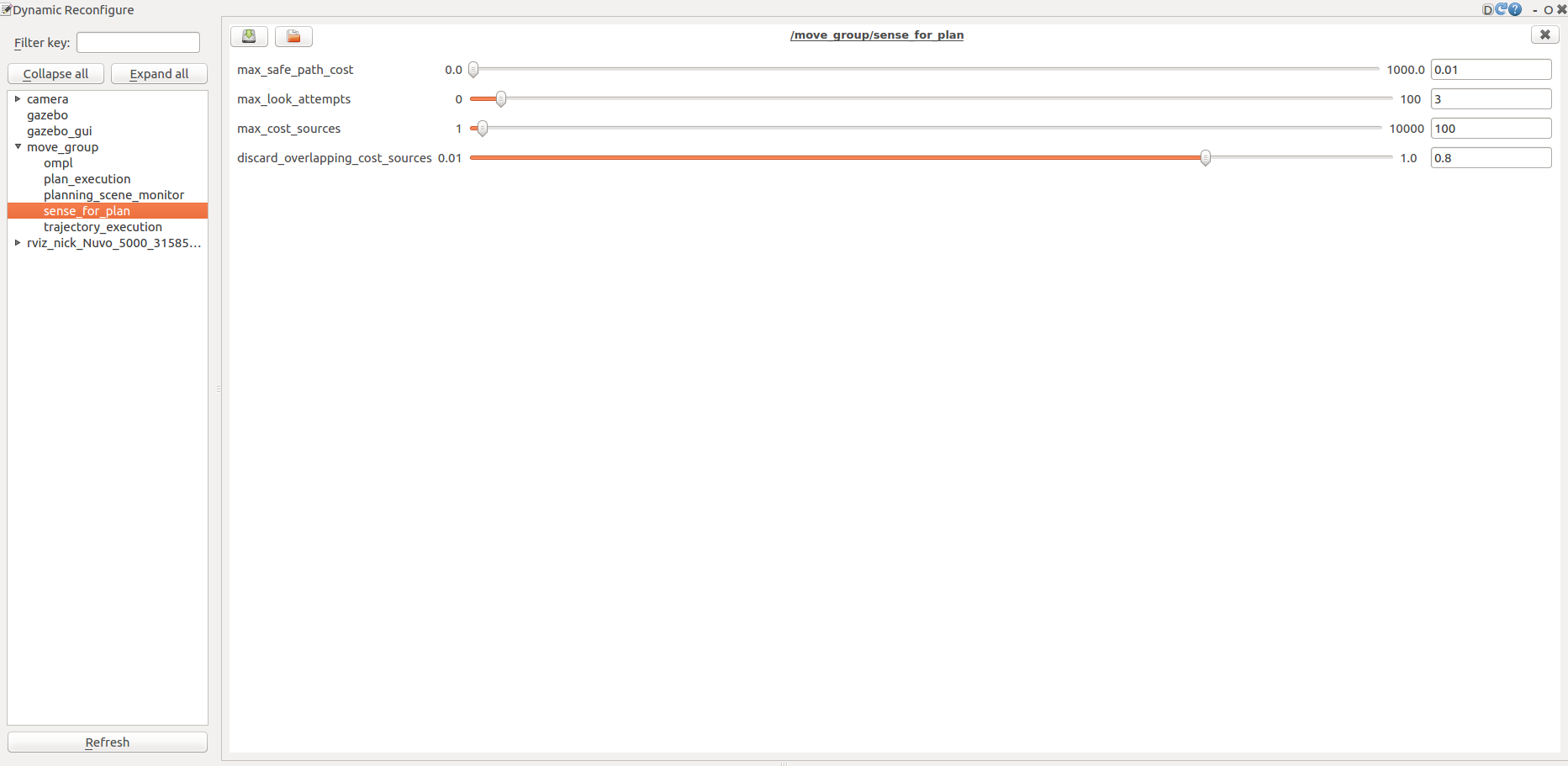
What is the function of max_look_attempts? Changing the value whilst running a node to move the robot doesn't result in any obvious difference that i can see, despite me having an octomap running and the robot traversing obstacles every now and again. Is it a kind of pseudo-continuous collision checking?
