
Display PointCloud Rviz
Following the Laser Scanner Data tutorial
I have managed to run the scan to point cloud converter but it seems wrong :
[ WARN] [1549986829.427357513]: MessageFilter [target=base_link ]: Dropped 100.00% of messages so far. Please turn the [ros.laserprojection.message_notifier] rosconsole logger to DEBUG for more information.
What is this error ?
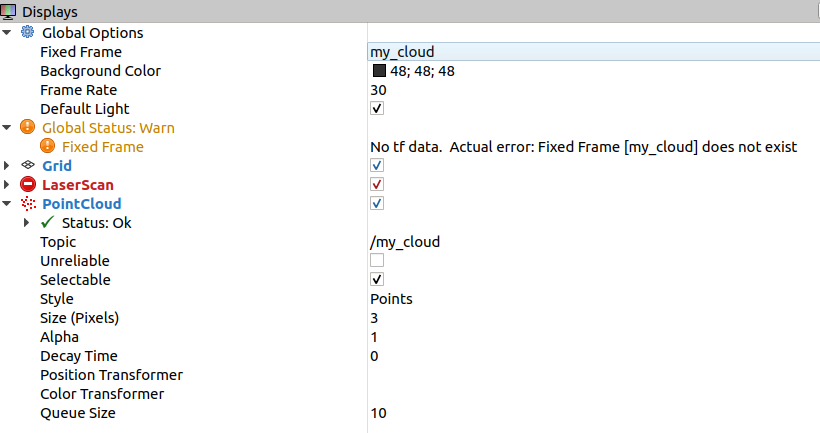
Also, I can't display the point cloud in Rviz, I don't know how to choose Fixed frame...
Any ideas ?
add a comment
