
Unable to send UTM move base goals to Rover
Hello!
I am attempting to implement a GPS guided rover.
However when I send a UTM goal to /move_base_simple/goal
I get the following issue:
[ WARN] [1545940576.270461738]: MessageFilter [target=odom ]: Discarding message from [/move_base] due to empty frame_id. This message will only print once.
Followed by repeating:
[ WARN] [1545940576.270723864]: Invalid argument passed to canTransform argument source_frame in tf2 frame_ids cannot be empty
I checked if all my frames transformations were being published and they all seem to be correct, so I am at a loss in finding the source of the empty frame_id error.
Oddly when I send a move base command in the "map" frame_id it works fine.
rostopic pub /move_base_simple/goal geometry_msgs/PoseStamped '{header: {stamp: now, frame_id: "map"}, pose: {position: {x: 2.0, y: 1.0, z: 0.0}, orientation: {w: 1.0}}}'
Here are my navigation .yaml files:
costmap_local.yaml:
global_frame: odom
rolling_window: true
width: 10.0
height: 10.0
resolution: 0.05
plugins:
- {name: obstacles_laser, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
costmap_global_static.yaml:
global_frame: map
rolling_window: true
static_map: false
track_unknown_space: true
plugins:
- {name: static, type: "costmap_2d::StaticLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
costmap_common.yaml:
footprint: [[-0.25, -0.33], [-0.25, 0.33], [0.25, 0.33], [0.25, -0.33]]
footprint_padding: 0.01
robot_base_frame: base_footprint
update_frequency: 1
publish_frequency: 3.0
transform_tolerance: 10
resolution: 0.05
obstacle_range: 5.5
raytrace_range: 6.0
#layer definitions
static:
map_topic: /map
subscribe_to_updates: true
obstacles_laser:
observation_sources: laser
laser: {data_type: LaserScan, clearing: true, marking: true, topic: scan, inf_is_valid: true}
inflation:
inflation_radius: .5
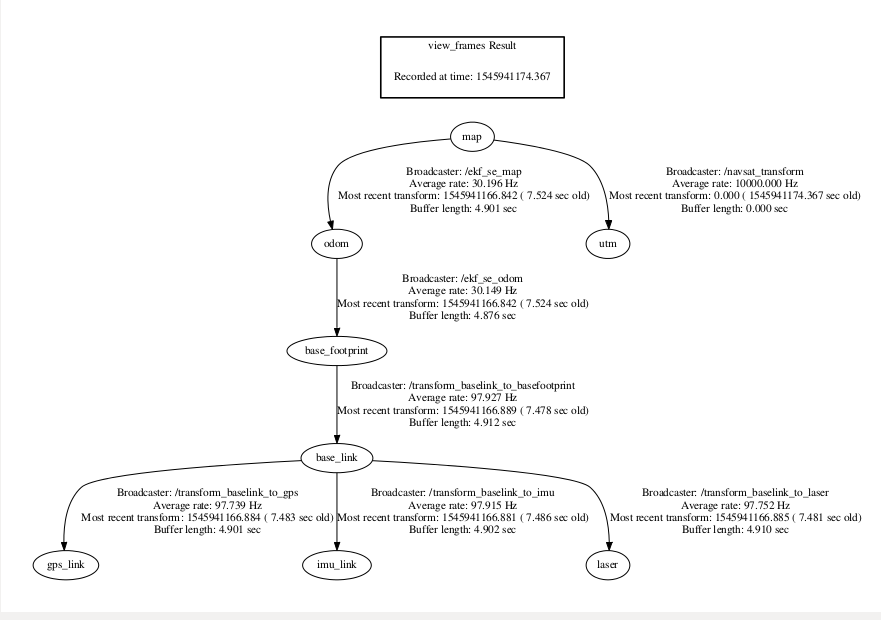
Here is my tf tree:
Let me know if there is anything else that can be provided!
add a comment

