
Strange behavior/missing joints when using MoveIt to configure gripper
I'm trying to build a simulation in Gazebo for a UR robot along with a Robotiq 2F-140 gripper (ideally with ros-melodic), but when using MoveIt to generate config files for a the robot coupled with the end effector, the robot poses for the gripper planning group don't appear to load correctly. As demonstrated in the gifs below, only the finger_joint appears in the group (which includes all the gripper joints).
What is even more confusing is that:
1) the first time I try to configure the pose, all of the joints are activated and move into position (not just the finger_joint).

2) But once the pose is saved, subsequent poses only actuate the finger_joint.

Notice that in the planning group, I have more than just the finger_joint selected.
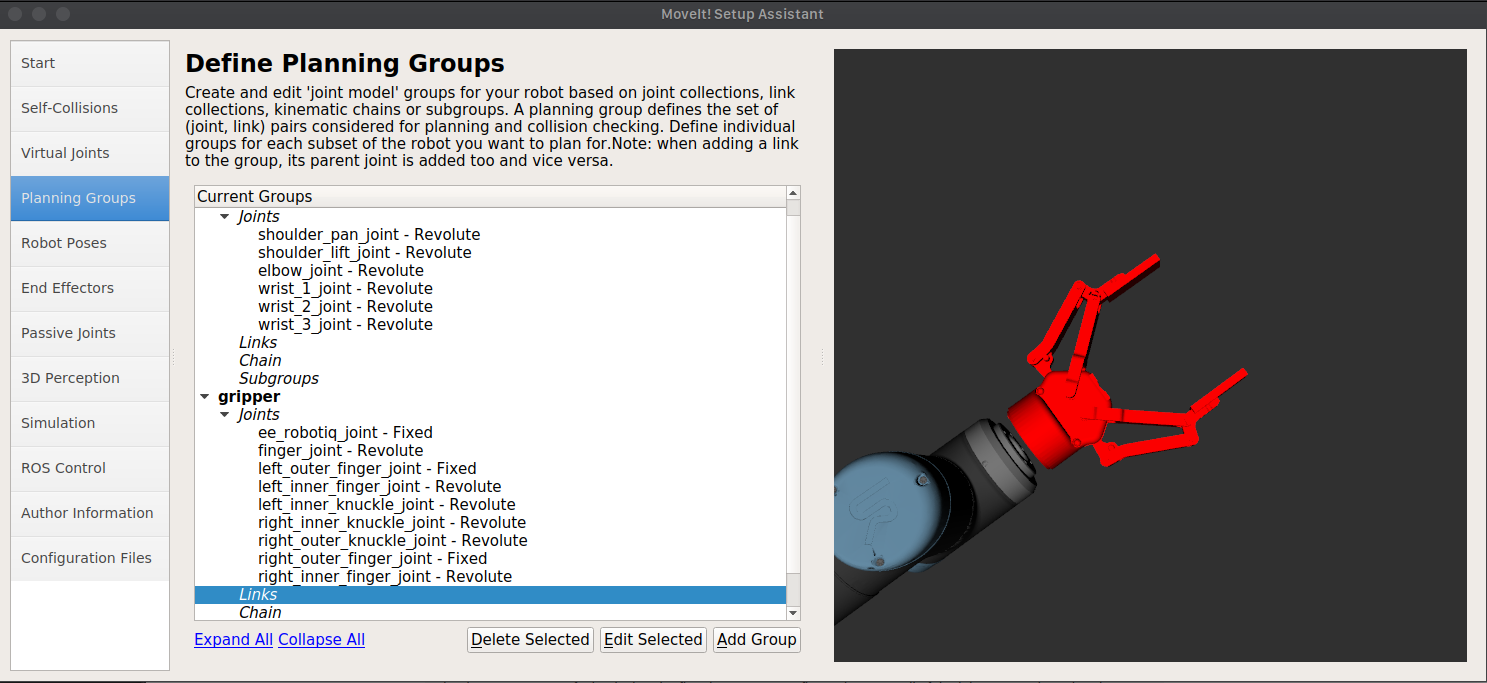
Is this expected behavior?
I have tried a number of different combinations including:
- urdf configurations using UR arm models (UR3/5/10) with both the 2f-140 and 2f-85 grippers
- ros-kinetic and ros-melodic
- Ubuntu 18.04 and Ubuntu 16.04
- urdfs that I have created, but also third party examples from tutorials and open source projects
Even with all these variations, I always get the same result, and must be missing something fundamental.
What could cause this to happen, and how do I correctly configure my robot for simulation?

Could this be related to the way I am creating the planning group as described here https://github.com/waypointrobotics/r... ? Depending on which joints I include, the gripper components detach in different ways, but I'm not clear about the correct configuration.
Hi there, I have the same problem. Did you by any chance find a solution? Also, could this be related to some sort of a mistake in the Robotiq urdf files? When attaching my gripper to ur10 in a urdf file it correctly adds the gripper's base link to the robot, but the fingers remain detached.
Same issue here. Has there been a solution found? Movement works fine (using the slider to open and close the gripper) in the
test_myrobot.launchfile from themyrobot_supportpackage. Hence, the URDF seems to be ok? Maybe a MoveIt! bug?So I found this TODO in the source code:
Maybe that's why?