
Very strange turn behavior with TEB planner
I use TEB as the local planner for the robot's navigation. The path of the original TEB planner is very reasonable, as Fig 1 shows.
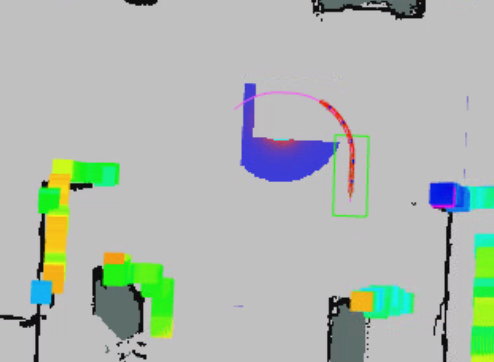
fig 1
But as it moves forward, the path becomes very strange. The path first knotted and then became complicated.
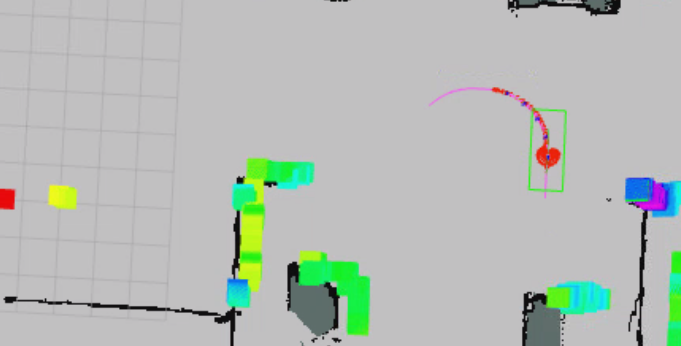
fig 2
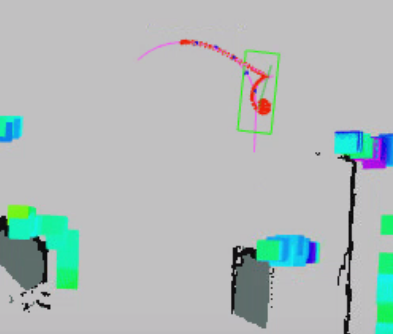
fig 3
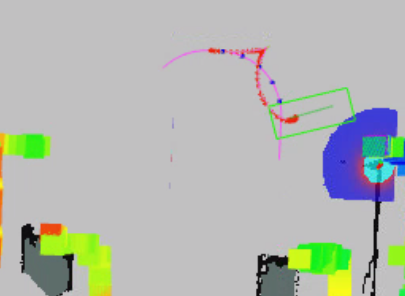
fig 4
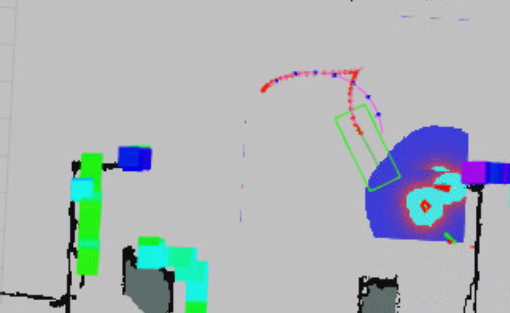
fig 5
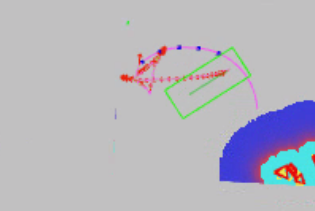
fig 6
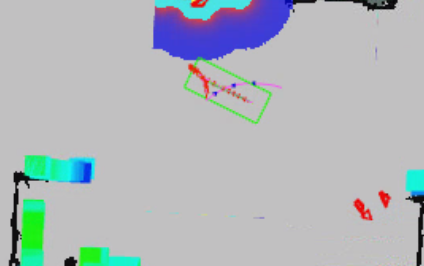
fig 7
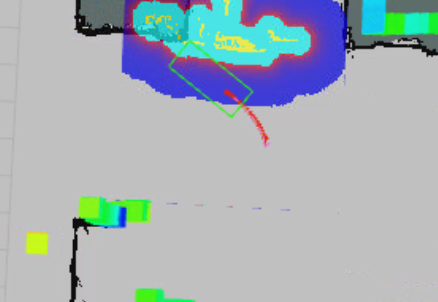
fig 8
Clearly the initial path is the best, why will it change?
I'd like to know:
- Causes of this problem.
- Possible ways to improve.
Can anyone give me some suggestion? Thanks in advance ;-)

I meet the problem too,I tried to solve it in the tutorial :"frequently asked questions "http://wiki.ros.org/action/fullsearch/teb_local_planner/Tutorials/Frequently%20Asked%20Questions?action=fullsearch&context=180&value=linkto%3A%22teb_local_planner%2FTutorials%2FFrequently+Asked+Questions%22 set global_plan_overwrite_orientation=false but it helpless maybe you could try
Hi,
Were you able to solve the problem? I'm facing similar issues and I don't know what's wrong with my parameters.
Thank you!
Tentative solution: try to increase weight_optimaltime to 10 or more
hi, were you solve the problem? how to solve it? thankyou