
MoveIt! for multiple robots
I've spawned 2 similar robots(with their controllers) with distinct namespaces (robot1,robot2) in Gazebo according to this. I intend to run two separate moveit instances to control them.
For now I've been trying to control one of them while the other is present in simulation.
The problem that I face is that gazebo publishes joint states as robot1/joint_states and robot2/joint_states but I get an error saying joint_states not found.
So I remapped robot1/joint_states to /joint_states and all works fine but this would be a problem when i try to control the second robot.
The rqt_graph after remap is attached : 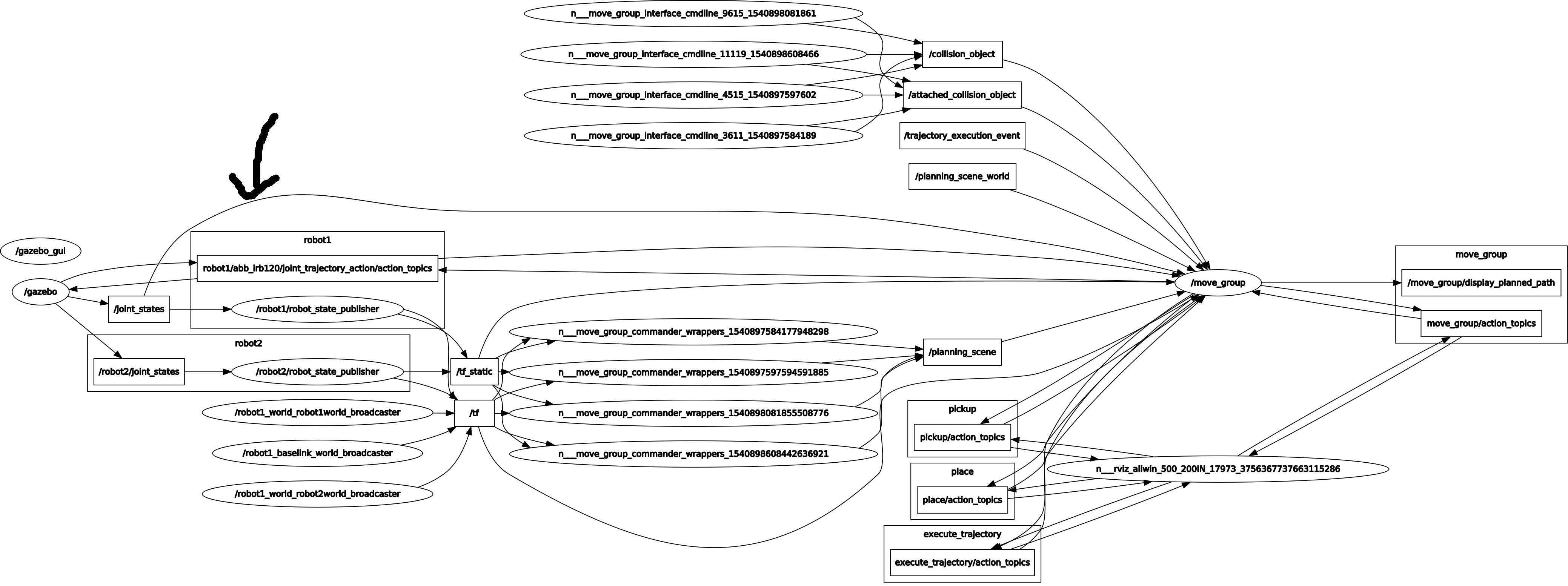
how can I make moveit subscribe to robot1/joint_states ?
or is there any other way to do this ?
PS : I do not want to run both robots using the same moveit node
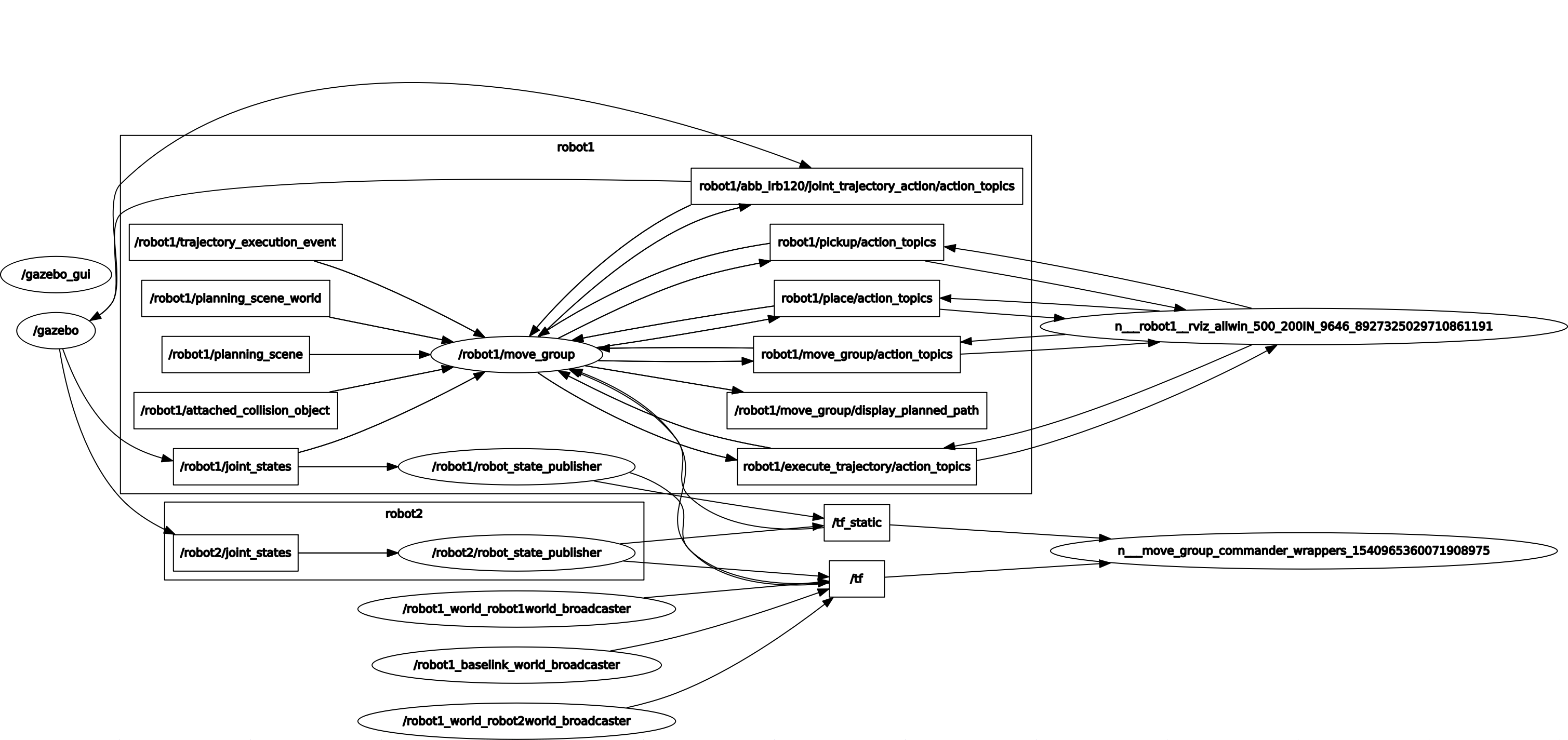

Will it work if i include moveit also in 'robot1' namespace