
ar_track_alvar not precise and not producing repeatable results
In my project i am taking a picture from an IP camera and converting that image in to a rostopic.. Then i used ar track to get information from visualization_marker topic and its working very well but the problem is that sometimes the Tag is not recognized by ar track and thus it publishes nothing on visualization marker ... all I want from ar track is to give me orientation of my tag..but out of 5 images only 3 will produces correct result sometimes even 2 .. following is the launch file for ar track can anyone help me with parameters i have put the marker size in cm... is it the correct unit? and the other two parameters max_new_marker_error and max_track_error ..how should i set them to obtain optimum results. and also please tell me if ar_track_alvar consistently produces un authentic results ...What could be the other factors that can effect the precesion of Ar_track_alvar
<launch>
<arg name="marker_size" default="12" />
<arg name="max_new_marker_error" default="0.08" />
<arg name="max_track_error" default="0.2" />
<arg name="cam_image_topic" default="/Sufyan_ImageTopic" />
<arg name="cam_info_topic" default="/v4l/camera/camera_info" />
<arg name="output_frame" default="/v4l_frame" />
<node name="ar_track_alvar" pkg="ar_track_alvar" type="individualMarkersNoKinect" respawn="false" output="screen">
<param name="marker_size" type="double" value="$(arg marker_size)" />
<param name="max_new_marker_error" type="double" value="$(arg max_new_marker_error)" />
<param name="max_track_error" type="double" value="$(arg max_track_error)" />
<param name="output_frame" type="string" value="$(arg output_frame)" />
<remap from="camera_image" to="$(arg cam_image_topic)" />
<remap from="camera_info" to="$(arg cam_info_topic)" />
</node>
</launch>


{kind=link}
{kind=link}
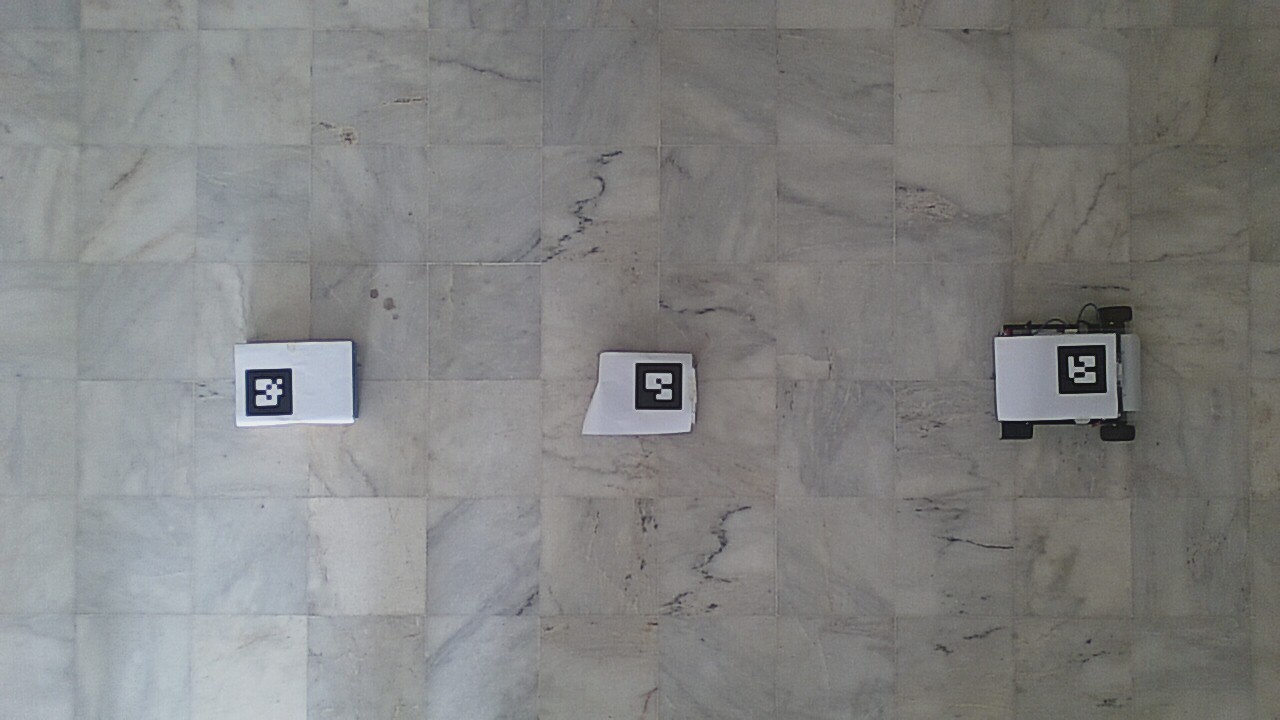
Your launch file looks okay, can you upload the camera images somewhere so we can see them. It's possible the image quality is too low for the tags to be reliably detected.
Hey!! sorry for late reply. I am using a 1 MP camera and my ar tag is about 4 meters from camera .. I have edited the question so now it contains 2 images