
The difference between ros_control or rtt_ros_control?
My ultimate goal is to implement real-time control in ros in order to make biped balance. And, I am relatively new to real-time control.
- In ROSCon-2014: ros_control: An overview, Adolfo explains the whole idea about ros_control. It is said that you can achieve real-time control using ros_control.
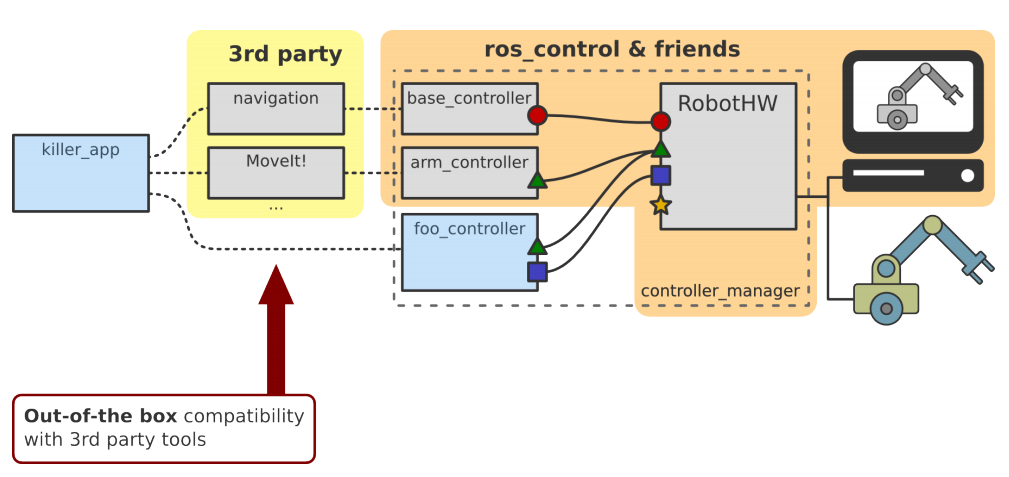
-> From my point of view, I can get IMU data in real-time and receive data and send commands to controller in real-time, then I shall be able to balance biped in real-time. Am I right?
2. However, I watched another roscon video - ROSCon-2017: How to design ROS-powered robots. He said that, "ros_control is component that running in orocos"

-> What does that suppose to mean?
-> Do we really need to install orocos in order to use ros_control?
3. Also, there are 2 repos related to ros_control.
https://github.com/orocos/rtt_ros_con...
https://github.com/ros-controls/ros_c...
-> Could anyone please explain their differences?
Thank you all in advance. :-)
Kaixian QU
