
robot localization weird bahavior when playing bag
I used GPS and IMU to localize my robot with robot_localization.
After I recorded my data, which includes topics Imu, NavSatFix and TwistWithCovarianceStamped, I played the bag and launch the nodes.
The bag is available at here
The launch files are as following:
Top level: gps_imu_localization_bag.launch
robot_localization:
- ekf_node: wam_v_ekf.launch
- nav_sat_transform_node: wam_v_navsat.launch
The parameter files for my robot are:
- ekf: wam_v_ekf.yaml
- nav_sat: wam_v_navsat
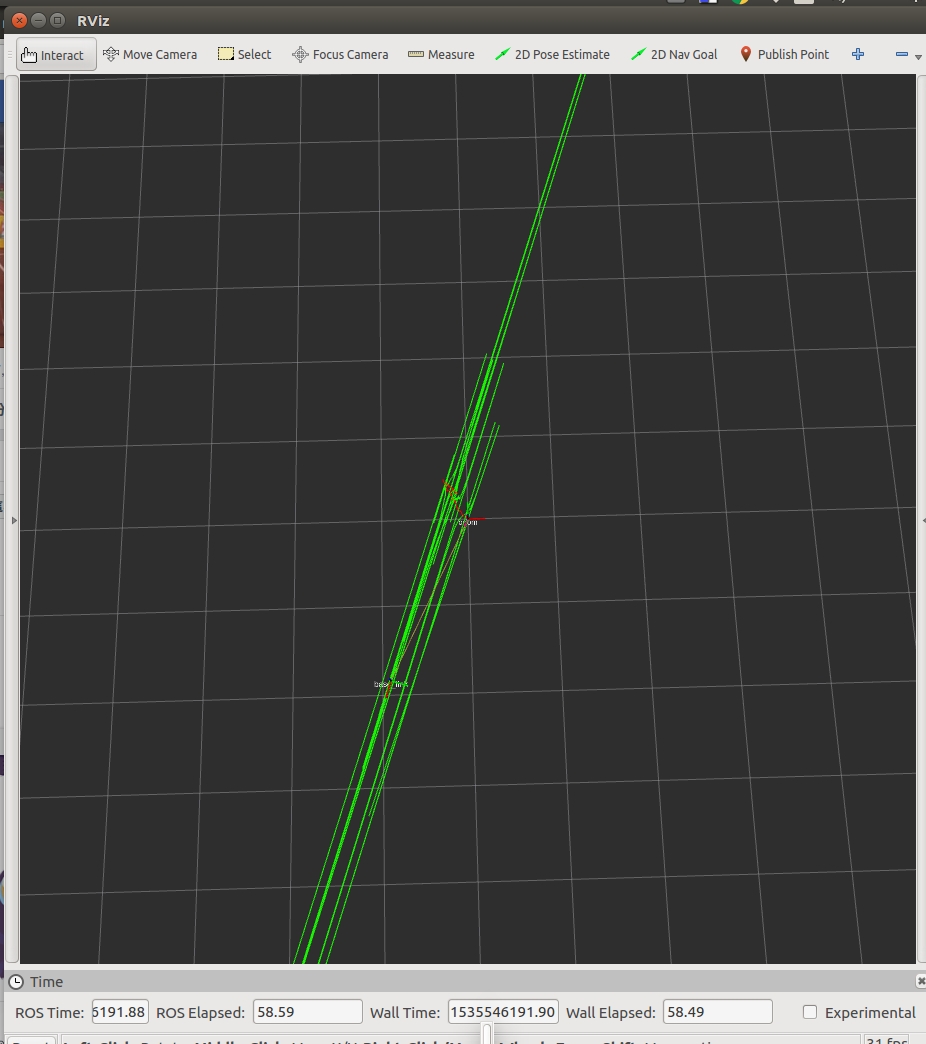
After I launched the file several times, I notices that the results are not always the same, sometimes the result seems good[Fig. 1], while sometimes the result were very terrible[Fig. 2].
Fig. 1
Fig. 2
It really confused me that with the same topics and the same parameters, I got the different results.
Notice also that the direction of oscillation of Fig. 2 is from northeast to southwest, which northeast is the direction from the origin of UTM to my position, a,k,a., Taiwan.


{kind=link}
{kind=link}