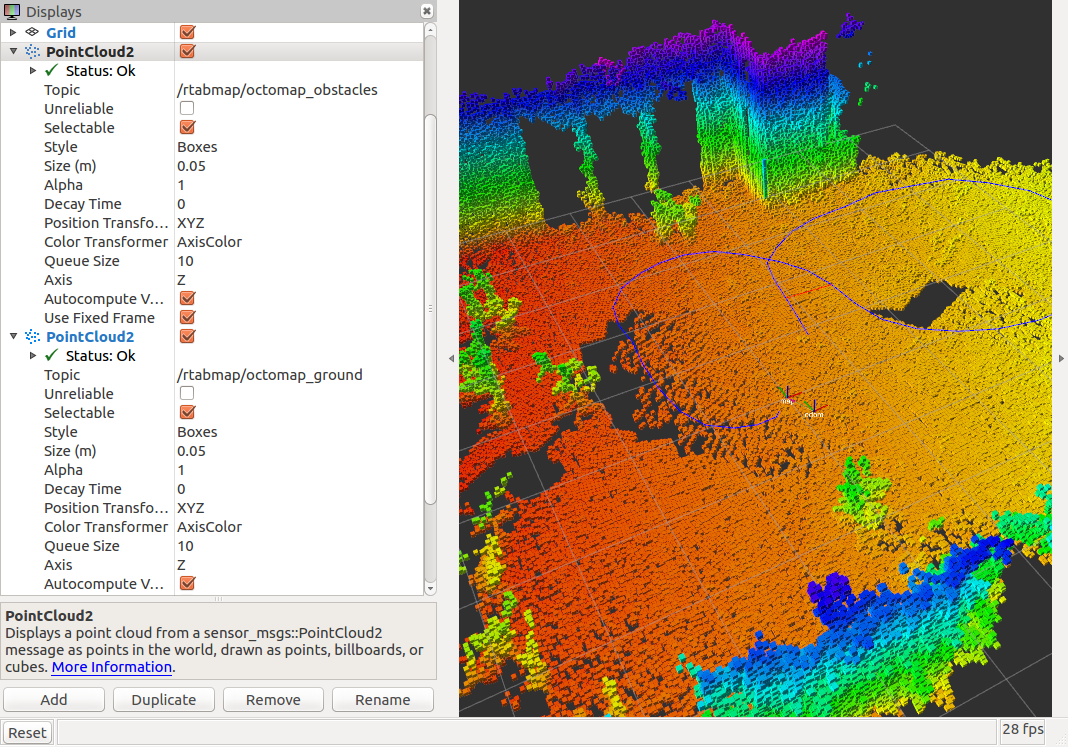
Rtabmap_ros does not show octo map but points clouds are good
Hi
Im using two point Grey Chameleon3 mono camera set up as Master Salve and synchronized so can work as stereo camera. I have a installed ROS driver and able to publish the camera topics . Im using this ROS driver https://github.com/KumarRobotics/flea3. And with roslaunch flea3 stereo_node.launch left:=18081067 right:=17496474 camera:=stereo_camera
can launch the driver. Im hand holding the cameras so for that case using this tutorial http://wiki.ros.org/rtabmap_ros/Tutorials/StereoHandHeldMapping about hand-held stereo mapping.
This is my launch file that Im launching with rtabmap$ roslaunch rtabmap_ros stereo_mapping.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 9000 --Stereo/MaxDisparity 80000 --Odom/Strategy 1 --Odom/GuessMotion true --Vis/EstimationType 1 --Vis/CorType 1 --Odom/ResetCountdown 1" left_image_topic:=/stereo_camera/left/image_rect_color queue_size:=40 stereo:=true rviz:=true rtabmapviz:=false
<launch>
<arg name="pi/2" value="1.5707963267948966" />
<arg name="optical_rotate" value=" 0 0 0 -$(arg pi/2) 0 -$(arg pi/2)" />
<node pkg="tf" type="static_transform_publisher" name="camera_base_link_rtabmap"
args="$(arg optical_rotate) base_link stereo_camera/left 100" />
<group ns="/stereo_camera" >
<node pkg="stereo_image_proc" type="stereo_image_proc" name="stereo_image_proc"/>
!-- Odometry -->
</group>
<!-- Choose between RGB-D and stereo -->
<arg name="stereo" default="true"/>
<!-- Choose visualization -->
<arg name="rtabmapviz" default="true" />
<arg name="rviz" default="false" />
<!-- Localization-only mode -->
<arg name="localization" default="false"/>
<!-- sim time for convenience, if playing a rosbag -->
<arg name="use_sim_time" default="false"/>
<param if="$(arg use_sim_time)" name="use_sim_time" value="true"/>
<!-- Corresponding config files -->
<arg name="cfg" default="" /> <!-- To change RTAB-Map's parameters, set the path of config file (*.ini) generated by the standalone app -->
<arg name="gui_cfg" default="~/.ros/rtabmap_gui.ini" />
<arg name="rviz_cfg" default="$(find rtabmap_ros)/launch/config/rgbd.rviz" />
<arg name="frame_id" default="base_link"/> <!-- Fixed frame id, you may set "base_link" or "base_footprint" if they are published -->
<arg name="odom_frame_id" default=""/> <!-- If set, TF is used to get odometry instead of the topic -->
<arg name="map_frame_id" default="map"/>
<arg name="ground_truth_frame_id" default=""/> <!-- e.g., "world" -->
<arg name="ground_truth_base_frame_id" default=""/> <!-- e.g., "tracker", a fake frame matching the frame "frame_id" (but on different TF tree) -->
<arg name="namespace" default="rtabmap"/>
<arg name="database_path" default="~/.ros/rtabmap.db"/>
<arg name="queue_size" default="10"/>
<arg name="wait_for_transform" default="0.2"/>
<arg name="args" default=""/> <!-- delete_db_on_start, udebug -->
<arg name="rtabmap_args" default="$(arg args)"/> <!-- deprecated, use "args" argument -->
<arg name="launch_prefix" default=""/> <!-- for debugging purpose, it fills launch-prefix tag of the nodes -->
<arg name="output" default="screen"/> <!-- Control node output (screen or log) -->
<!-- if timestamps of the input topics are synchronized using approximate or exact time policy-->
<arg if="$(arg stereo)" name="approx_sync" default="false"/>
<arg unless="$(arg stereo)" name="approx_sync" default="true"/>
<!-- RGB-D related topics -->
<arg name="rgb_topic" default="/camera/rgb/image_rect_color" />
<arg name="depth_topic" default="/camera/depth_registered/image_raw" />
<arg name="camera_info_topic" default="/camera/rgb/camera_info" />
<arg name="depth_camera_info_topic" default="$(arg camera_info_topic)" />
<!-- stereo related topics -->
<arg name="stereo_namespace" default="/stereo_camera"/>
<arg name="left_image_topic" default="$(arg stereo_namespace)/left/image_rect" />
<arg name="right_image_topic" default="$(arg stereo_namespace)/right/image_rect" /> <!-- using grayscale image for efficiency -->
<arg name="left_camera_info_topic" default="$(arg stereo_namespace)/left/camera_info" />
<arg name ...