
How to include laser_filters node in turtlebot3_slam.launch?
Actually, I want to visualize the data from the 3D-Laser sensor of turtlebot3-burger using SLAM. For our research, we need to have an angular boundary for laser sensor to be between -pi/4 and +pi/4 rather than original 360 degree. I have created a node in turtlebot3_slam.launch[1] file for laser_filters. And, I have created a test.yaml[2] file in the same location where the launch file is. While launching the turtlebot3_slam.launch there were no errors, but I could not find the desired output.
[1] turtlebot3_slam.launch
<launch>
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="slam_methods" default="gmapping" doc="slam type [gmapping, cartographer, hector, karto, frontier_exploration]"/>
<arg name="configuration_basename" default="turtlebot3_lds_2d.lua"/>
<arg name="open_rviz" default="true"/>
<!-- added by Sujeet begins -->
<node pkg="laser_filters" type="scan_to_scan_filter_chain"
name="laser_filter">
<rosparam command="load" file="/home/sujeet/catkin_ws/src/turtlebot3/turtlebot3_slam/launch/test.yaml" />
<remap from="scan" to="base_scan" />
</node>
<!-- added by Sujeet ends -->
<include file="$(find turtlebot3_bringup)/launch/turtlebot3_remote.launch">
<arg name="model" value="$(arg model)" />
</include>
<include file="$(find turtlebot3_slam)/launch/turtlebot3_$(arg slam_methods).launch">
<arg name="model" value="$(arg model)"/>
<arg name="configuration_basename" value="$(arg configuration_basename)"/>
</include>
<group if="$(arg open_rviz)">
<node pkg="rviz" type="rviz" name="rviz" required="true"
args="-d $(find turtlebot3_slam)/rviz/turtlebot3_$(arg slam_methods).rviz"/>
</group>
</launch>
[2] test.yaml
scan_filter_chain:
- name: angle
type: LaserScanAngularBoundsFilter
params:
lower_angle: -0.78
upper_angle: +0.78
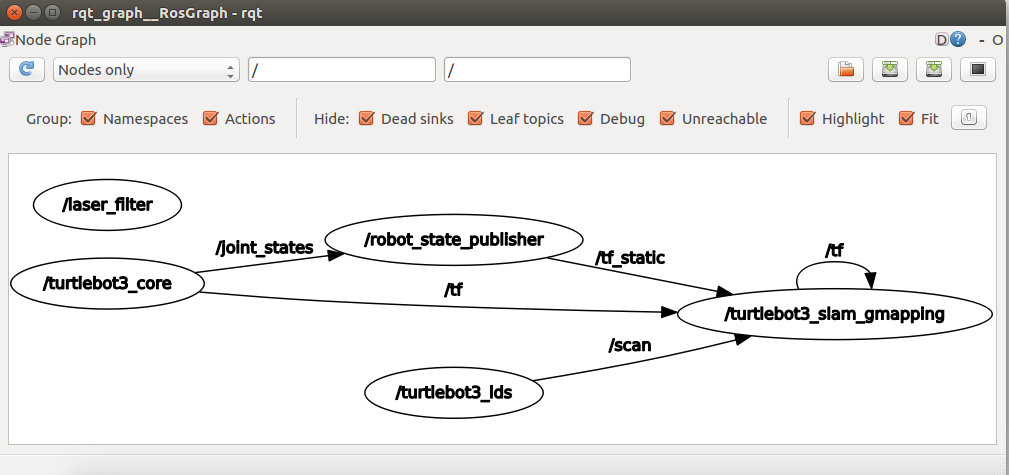
rqt_graph:

Can you please update your question with a copy and paste of the files? That way the question will be self-contained and won't lose value if/when the files disappear (which happens quite often).
Please note that you should always copy and paste text and not use images (which makes it a good thing that you weren't able to upload them). Images are not searchable and people can't copy and paste the text from images either.
Thanks @jayess, I have put the texts now.
What is the output topics with a scan? Is it really "base_scan"?
I don't know about "base_scan" @destogi, I have not changed anything after the installation from the ROS official tutorial except only that node there in the launch file and the new yaml file.
@destogl, here's the image link of rqt_graph. Thanks https://drive.google.com/file/d/1Mt7H...
@sujeet I've given you some karma, can you please update your question with graph uploaded to the question instead? That way the question will be self-contained