
Traffic planning in rviz and execution in Gazebo problem
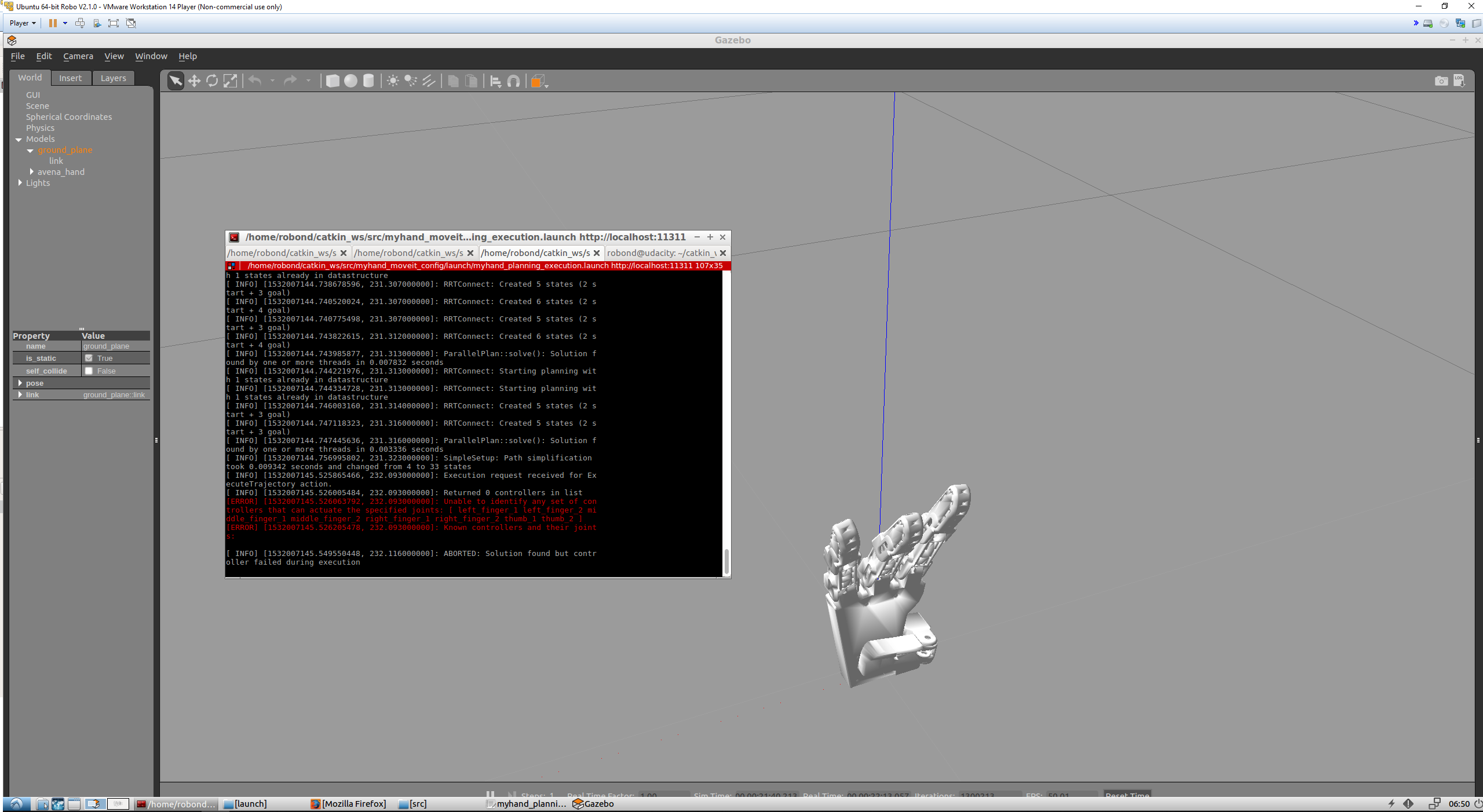
Using the moveit package I wanted to create a controller controlling my own hand using .py scripts. In my model I already have a controller, thanks to which I can move my hand with rqt_gui, but I wanted to go a step further. I did everything as in the movie https://youtu.be/j6bBxfD_bYs . The problem appeared at this moment https://youtu.be/rfcXZcKZd8A?t=922 . On my rostopic list do not appear topics ... / goal, ... / result etc. I know the problem is in the controller, but I do not know how to solve it because I'm a beginner. I post a few ss.




Please attach all your images to your question directly. I've given you enough karma to do that.
Also, please don't use images for text. Images are not searchable and people cannot copy and paste the text from the images. Please update your question with a copy and paste of the text instead.