
Gmapping working on my jackal but localization is not working
I have a clearpath jackal robot which I am using the nav stack on. I have successfully configured the robot so that when I run:
roslaunch jackal_viz view_robot.launch config:=gmapping I am able to map the office environment that the jackal is in. However, after saving the map and running
roslaunch jackal_navigation amcl_demo.launch map_file:=/path/to/my/map/mymap.yaml on the jackal and
roslaunch jackal_viz view_robot.launch config:=localization I get an error in Rviz saying Fixed Frame [map] does not exist. Using the same launch files, the localization works in simulation (Gazebo), but it does not work on the real jackal. Any help would be appreciated, I am very new to ROS.

{kind=link}
are you sure nav_stack is running?
Yes. I follow exactly the same steps that I used in simulation and worked, but now on the actual jackal it doesn't work
use
rosrun rqt_tf_tree rqt_tf_treeon a sourced window to see if map frame exists. Also check/maptopic, userostopic info /mapto see which nodes are subscribing to it, and whether move_base has subscribed to it.Are you literally typing
/path/to/my/map/mymap.yamlfor the path or is this just a place holder for your question?No I am including the actual path. It was just a place holder for my question
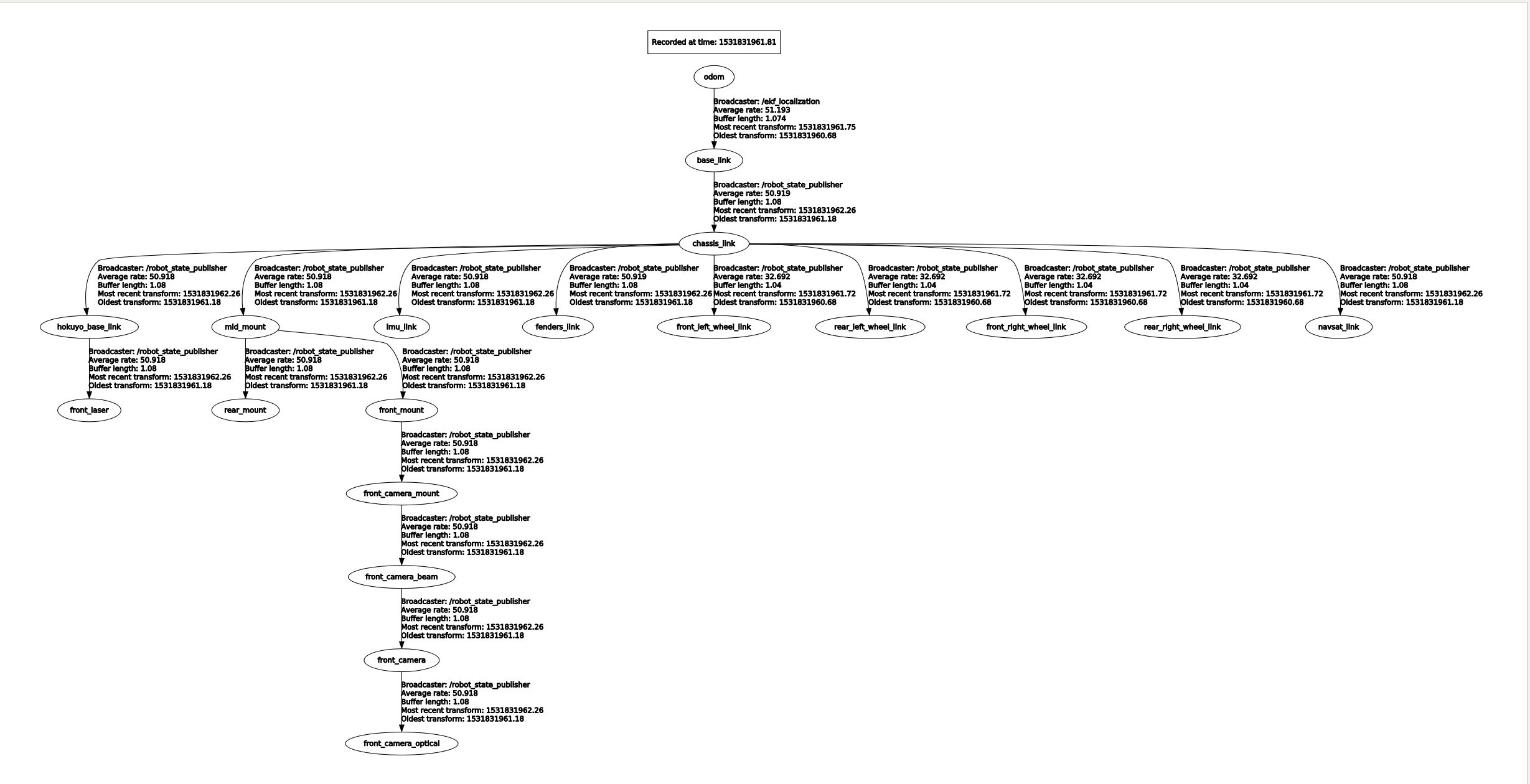
The tf tree shows that there's no map frame, is the
map_serverrunning? Also, can you post therqt_graphof your system? I've given some karma so that you can put images directly into your question.