
Velodyne HDL32 FPS issue
Hi Pals,
I've been using the latest velodyne package in order to receive data from the HDL-32E. I am using ubuntu 14.04.5 with a ROS indigo installation.
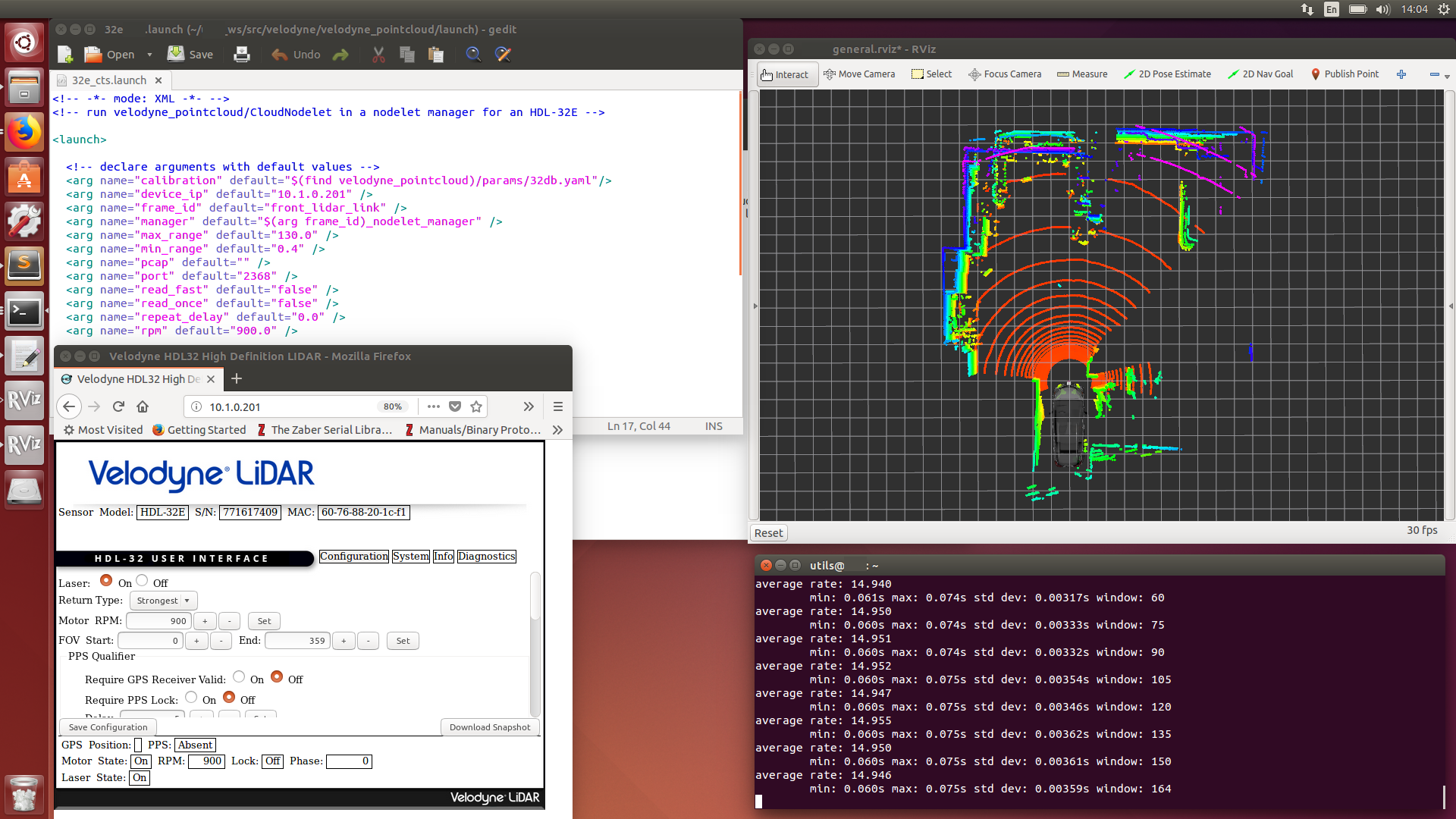
The driver mostly works fine, getting the desired 15Hz on a 900 RPM lidar rotation (and respectfully other Hz corresponding to other RPMs). This was checked via "rostopiz hz".
Using the Lidar on it's regular configuration generates ~50k points per frame, which is too much for me, especially considering I only need the front +-60 degrees (120 deg in total, which is a third of the whole 360 deg sweep). So I put that information into the corresponding slots inside the lidar's web GUI (you can choose the desired sweep angle), and I do get the desired sweep when I look in Rviz.
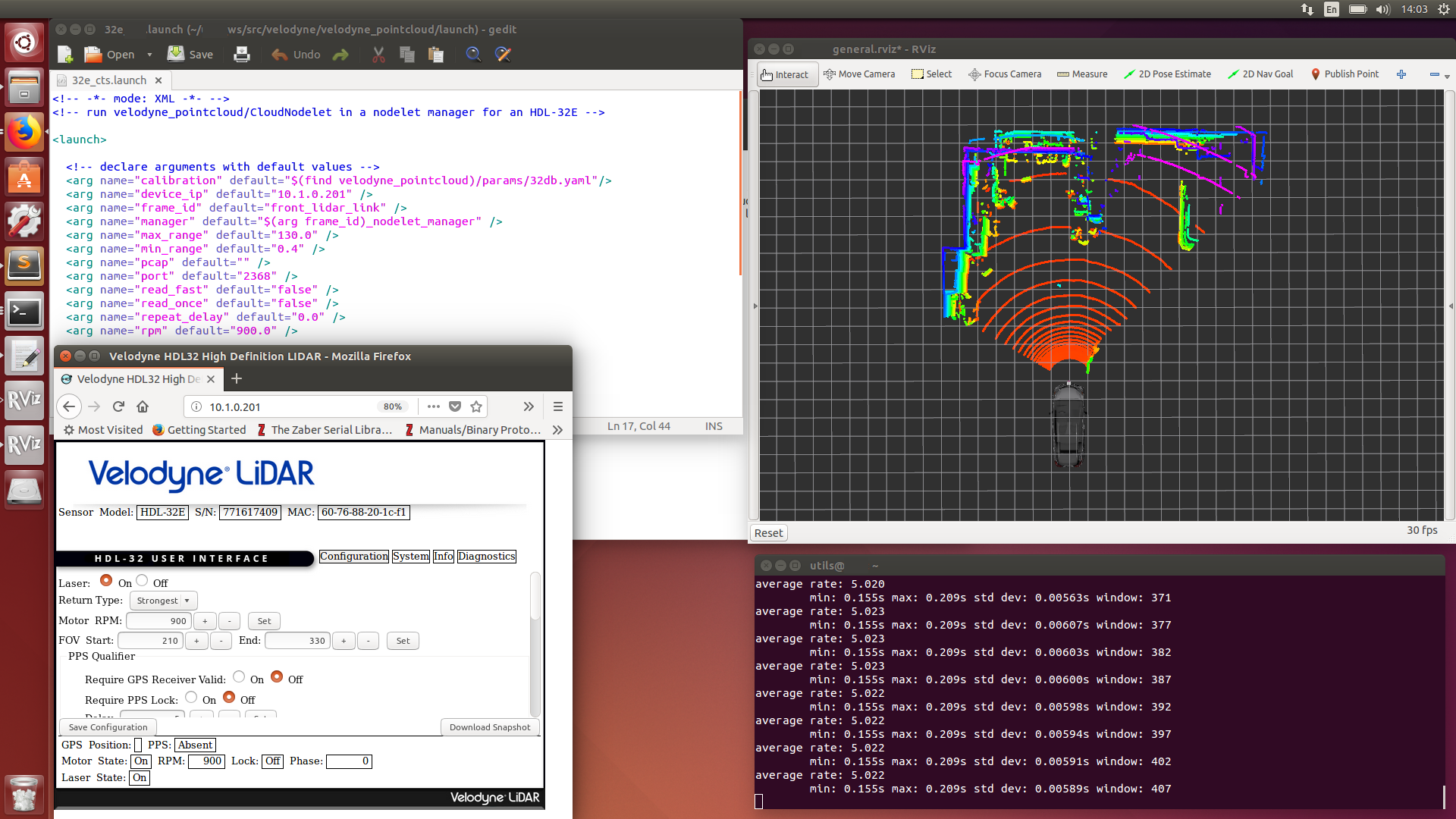
Now for the problem: I get the same amount of points per message, with the messages coming in at 1/3rd of the rate. The lidar is accumulating points for 3 revolutions and then publishing 1 message. Tests I've made show that this is probably a driver issue and not hardware. I found no parameter to change that might affect this behavior.
Here are some screenshots, with the Rviz, launch file, and velodyne web gui open.
Note that for full 360deg you get 15 fps, on a 120deg fan you get 5 fps (360/3->15/3), and on a 72deg fan you get 3 fps.
https://drive.google.com/open?id=1m0C.. .
https://drive.google.com/open?id=12B6.. .
https://drive.google.com/open?id=1qy8.. .
If anyone ever tried to limit the sweep before and get it to work, I'de love to hear.
Thanks in advance, Steve
EDIT: adding pics directly. Firefox gave me trouble for some reason



Can you please attach the screenshots to your question directly instead of linking to google drive?