
dwa_local_planner
Hello.
The move_base don't create the shortest distance path.
I need help. please advise me.
My setting is below.
My PC is Unbuntu 16.04 , Ros Kinetic.
My robot is turtlebot3 waffle ,
I use turtlebot3 navigation reference source code .
-> https://github.com/ROBOTIS-GIT/turtle... .
I use launch command to run move_base node .
-> roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml
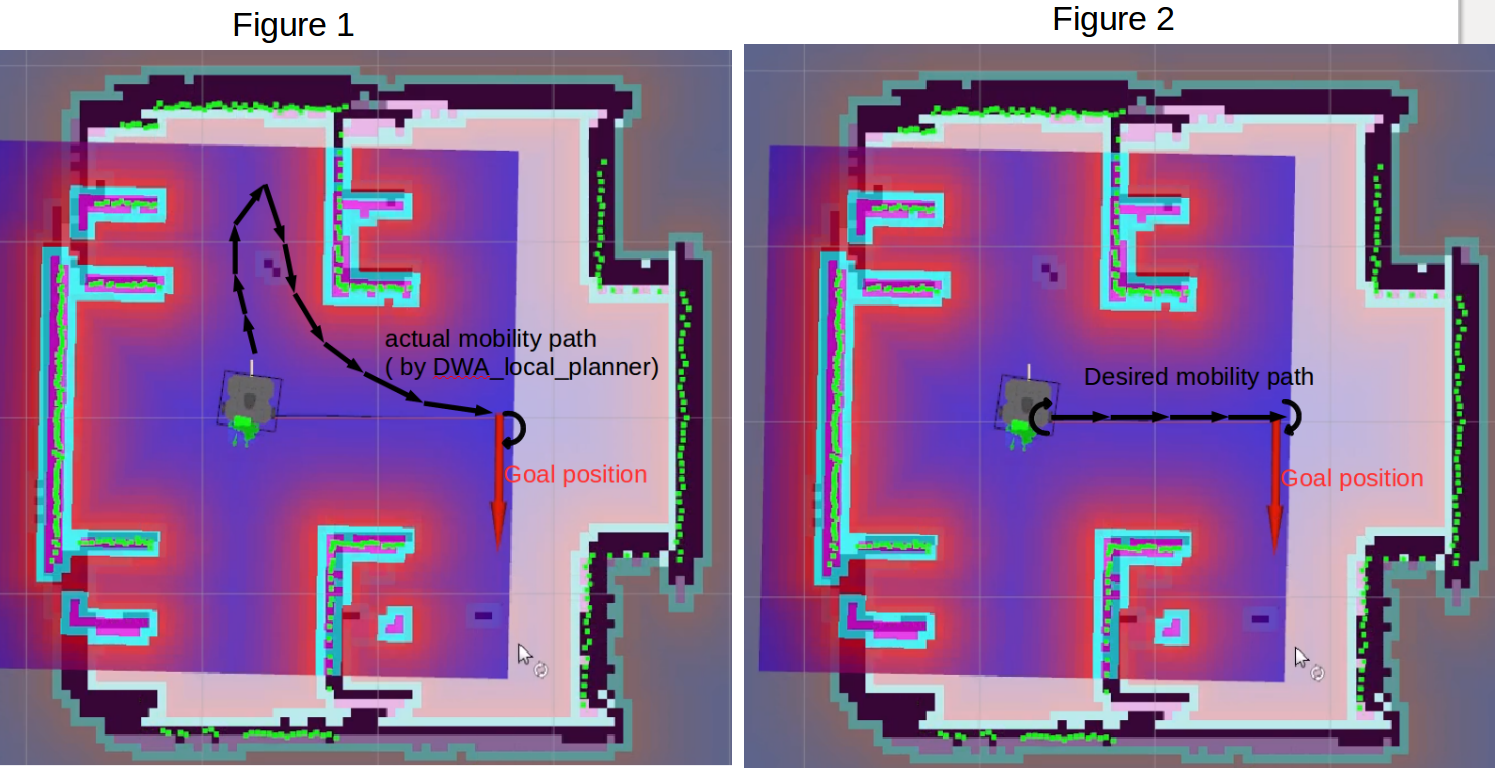
By the way, if I set the goal position , Sometimes the robot moves to the Goal as shown in Figure 1.
I want the robot to move the shortest distance path as shown in Figure 2.
Click image to link to YouTube video.
video time line ( 0:00 ~ 0:30) -> actual mobility path , picture 1 ( Control robot by move_base & dwa_local_planner package )
video time line ( 0:30 ~ 0:58) -> desired mobility path , picture 2 (Control robot by turtlebot3_teleop package )
What parameters need to be changed to improve the path?
I will attach the parameter value that I used.
- dwa_local_planner_params
https://github.com/ROBOTIS-GIT/turtle... DWAPlannerROS:
Robot Configuration Parameters
max_vel_x: 0.26
min_vel_x: -0.26
max_vel_y: 0.0
min_vel_y: 0.0
// The velocity when robot is moving in a straight line
max_trans_vel: 0.26
min_trans_vel: 0.13
max_rot_vel: 1.82
min_rot_vel: 0.9
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 3.2
// Goal Tolerance Parametes
xy_goal_tolerance: 0.05
yaw_goal_tolerance: 0.17
latch_xy_goal_tolerance: false
// Forward Simulation Parameters
sim_time: 2.0
vx_samples: 20
vy_samples: 0
vtheta_samples: 40
controller_frequency: 10.0
// Trajectory Scoring Parameters
path_distance_bias: 32.0
goal_distance_bias: 20.0
occdist_scale: 0.02
forward_point_distance: 0.325
stop_time_buffer: 0.2
scaling_speed: 0.25
max_scaling_factor: 0.2
// Oscillation Prevention Parameters oscillation_reset_dist: 0.05
// Debugging
publish_traj_pc : true
publish_cost_grid_pc: true
move_base_params
-> https://github.com/ROBOTIS-GIT/turtle... shutdown_costmaps: false
controller_frequency: 10.0
planner_patience: 5.0
controller_patience: 15.0
conservative_reset_dist: 3.0
planner_frequency: 5.0
oscillation_timeout: 10.0
oscillation_distance: 0.2costmap_common_params
https://github.com/ROBOTIS-GIT/turtle...global_costmap_params
https://github.com/ROBOTIS-GIT/turtle...local_costmap_params
https://github.com/ROBOTIS-GIT/turtle...

Please use question title as short summary of your problem. Your question have higher probability to be answered by someone else that way.
what does the global plan looks like?Is there only local plan in the video?