
TF tree breaks if parent is lost?
In a multiple robot situation, will all child coordinate frames in a TF tree stop working if communication with the parent is lost?
For example, I have two aircraft that are trying to localize themselves to a ground target. The first aircraft (aircraft 1) is able to see the ground target and track it using the transformation from ground target to aircraft 1. The second aircraft (aircraft 2) can only see aircraft 1. Currently, our parent in our TF tree is aircraft 2's frame. If communication is lost between aircraft 1 and aircraft 2, can aircraft 1 no longer compute the transformation between itself and the ground target?
If this is the case, is there a workaround for this problem? Or is TF just not reliable for multiple robots with intermittent coms?
I've searched for this topic and it seems like it is a fairly fundamental concept, however, I was unable to find the answer. If I missed some link that obvious, please let me know. Thanks.
Edit: I don't have enough Karma to upload a figure, but here is what my TF tree looks like. We are not localizing in a world frame, but rather everything is relative to Aircraft 2. In theory, if we don't have the transform from Aircraft 2 to 1, we should still have the transform from Aircraft 1 to the ground target in some other relative coordinate frame. You can also view Aircraft 2 as a world frame. If you lose contact with the world frame, will TF still allow for locally observed coordinate frames to be calculated assuming Aircraft 1 has a bearing and range to the ground target?
Aircraft 2 --------> Aircraft 1 ---------> Ground target
Another view of this could be:
World ----------> Robot -----------> Target
If World to Robot is lost, can Robot to Target still be calculated in TF or will TF break if the parent coordinate frame is no longer communicating? This is not to be confused with:
Target <---------- World ----------> Robot
In which case it is clear that if the World is lost, Robot to Target cannot be calculated.
Edit2: I can now attach an image of my TF tree. If I lose handoff_mav_1, can I still calculate the link circled in red?
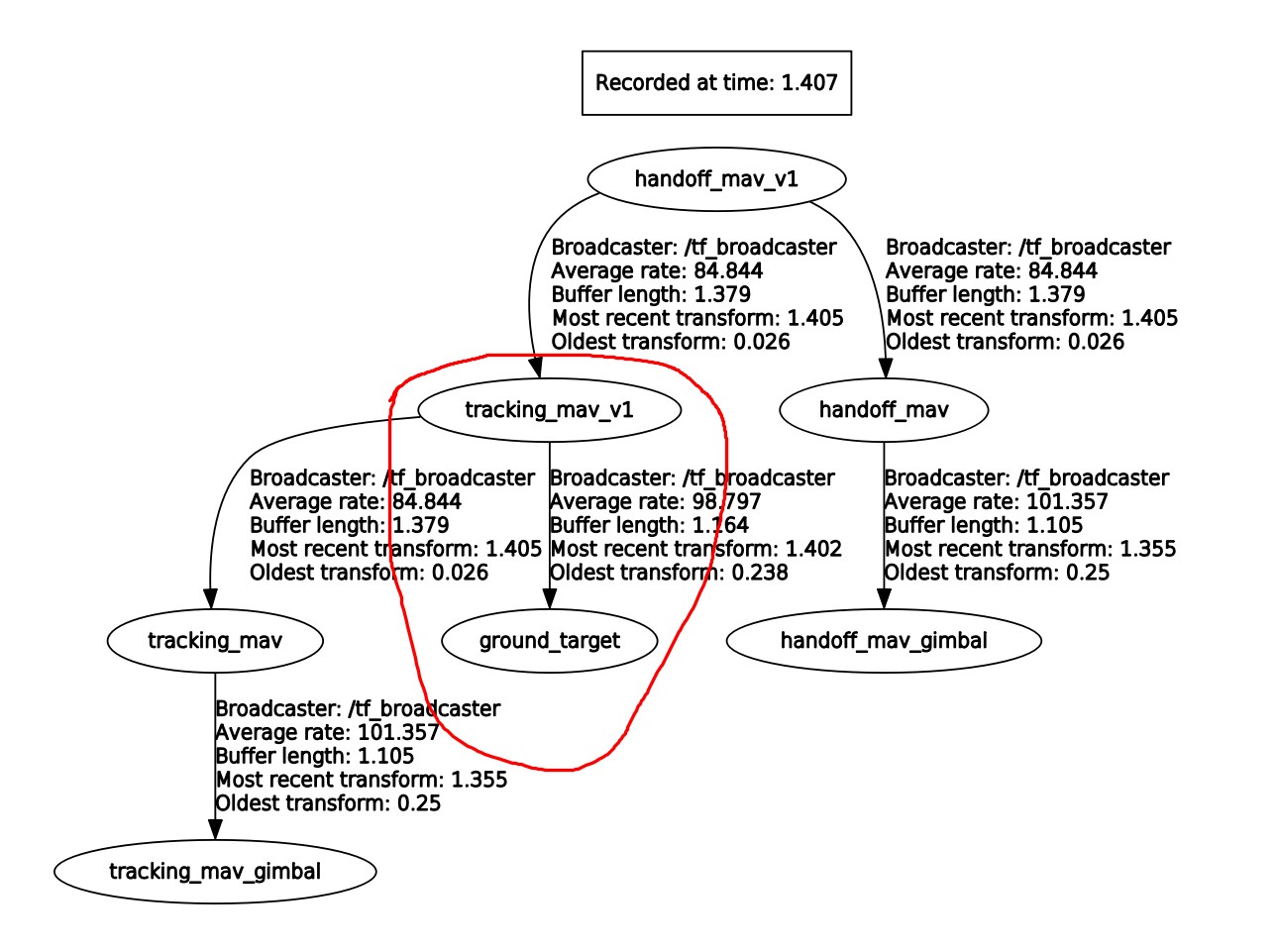


Can you upload the printout of your tf tree now?