
navigation problem inflation layer ?
hi,
I'm trying to use the navigation stack on my own robot , i'm using the hokuyo laser and i already done all the stuff about the controller driver odometry and amcl , and for the navigation stack so the problem is that when i select a point de navigate on the map a trajectory is drawn and the robot start to move but in few meters the obstacle layer like shown on the second picture take all the place despite there is no obstacle and the robot start to turning around himself because he think the path is blocked why i'm getting this ?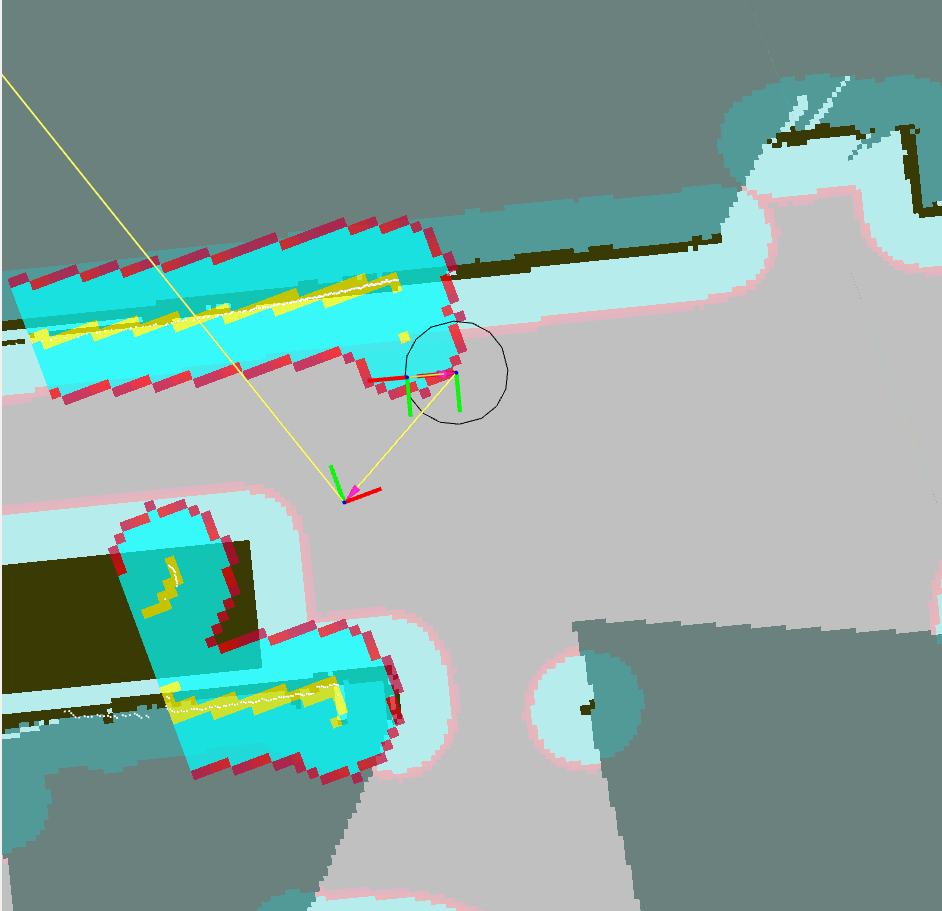 (/upfiles/15264603816267928.png)(/upfiles/15264603678948594.png)
(/upfiles/15264603816267928.png)(/upfiles/15264603678948594.png) 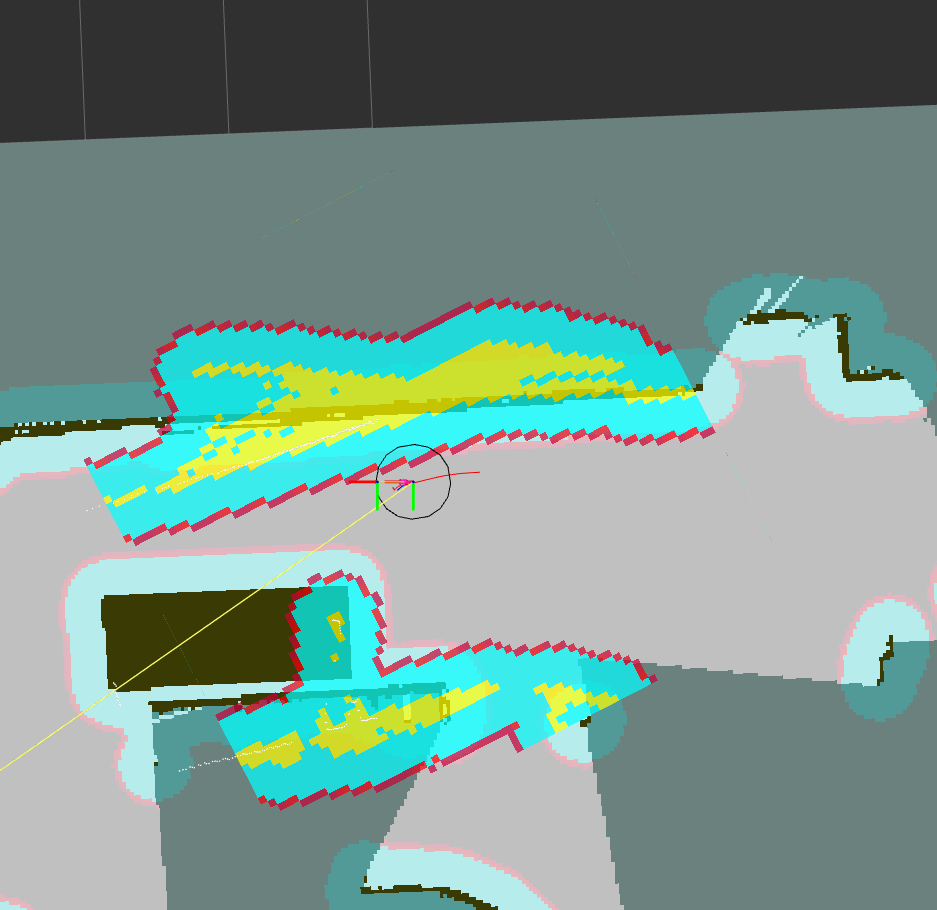
Edit: @FrozenCh here is the local costmap i'm using :
local_costmap:
global_frame: /map
robot_base_frame: /base_link
update_frequency: 5.0
publish_frequency: 2.0
static_map: false rolling_window:
true width: 4.0 height: 4.0
transform_tolerance: 0.5
resolution: 0.05 plugins:
- {name: obstacle_layer, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
here is the amcl setting that i used :
<launch>
<arg name="use_map_topic" default="false"/>
<arg name="scan_topic" default="scan"/>
<arg name="initial_pose_x" default="0.0"/>
<arg name="initial_pose_y" default="0.0"/>
<arg name="initial_pose_a" default="0.0"/>
<arg name="odom_frame_id" default="odom"/>
<arg name="base_frame_id" default="base_link"/>
<arg name="global_frame_id" default="map"/>
<node pkg="amcl" type="amcl" name="amcl">
<param name="use_map_topic" value="$(arg use_map_topic)"/>
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="60"/>
<param name="laser_max_range" value="12.0"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="2000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.2"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.25"/>
<param name="update_min_a" value="0.2"/>
<param name="odom_frame_id" value="$(arg odom_frame_id)"/>
<param name="base_frame_id" value="$(arg base_frame_id)"/>
<param name="global_frame_id" value="$(arg global_frame_id)"/>
<param name="resample_interval" value="1"/>
<!-- Increase tolerance because the computer can get quite busy -->
<param name="transform_tolerance" value="1.0"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
<param name="initial_pose_x" value="$(arg initial_pose_x)"/>
<param name="initial_pose_y" value="$(arg initial_pose_y)"/>
<param name="initial_pose_a" value="$(arg initial_pose_a)"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>

It looks like these is something wrong with the scan topic and your cost map just reflects to the bad data.
and besides, could you show us the cost map setting you made for obstacle layer?
It looks like you localisation is way off, this means that the LIDAR scan data is being added to the wrong part of the cost map and filling it with obstacles. I'd take a step back and get the localisation working first.
@PeteBlackerThe3rd thanks for answering , do you have any idea to check if the localisation is working well , i followed this tutorial and everthing seems to be right with the localization
i have some doubt about the updating map parameter
@kesuke to test the localisation you manually drive your robot around with the mapping system running and visual check using RVIZ that it builds a map correctly and shows the robot in roughly the right place.
i did and it builds map correctly and the robot seems to be on the right place