
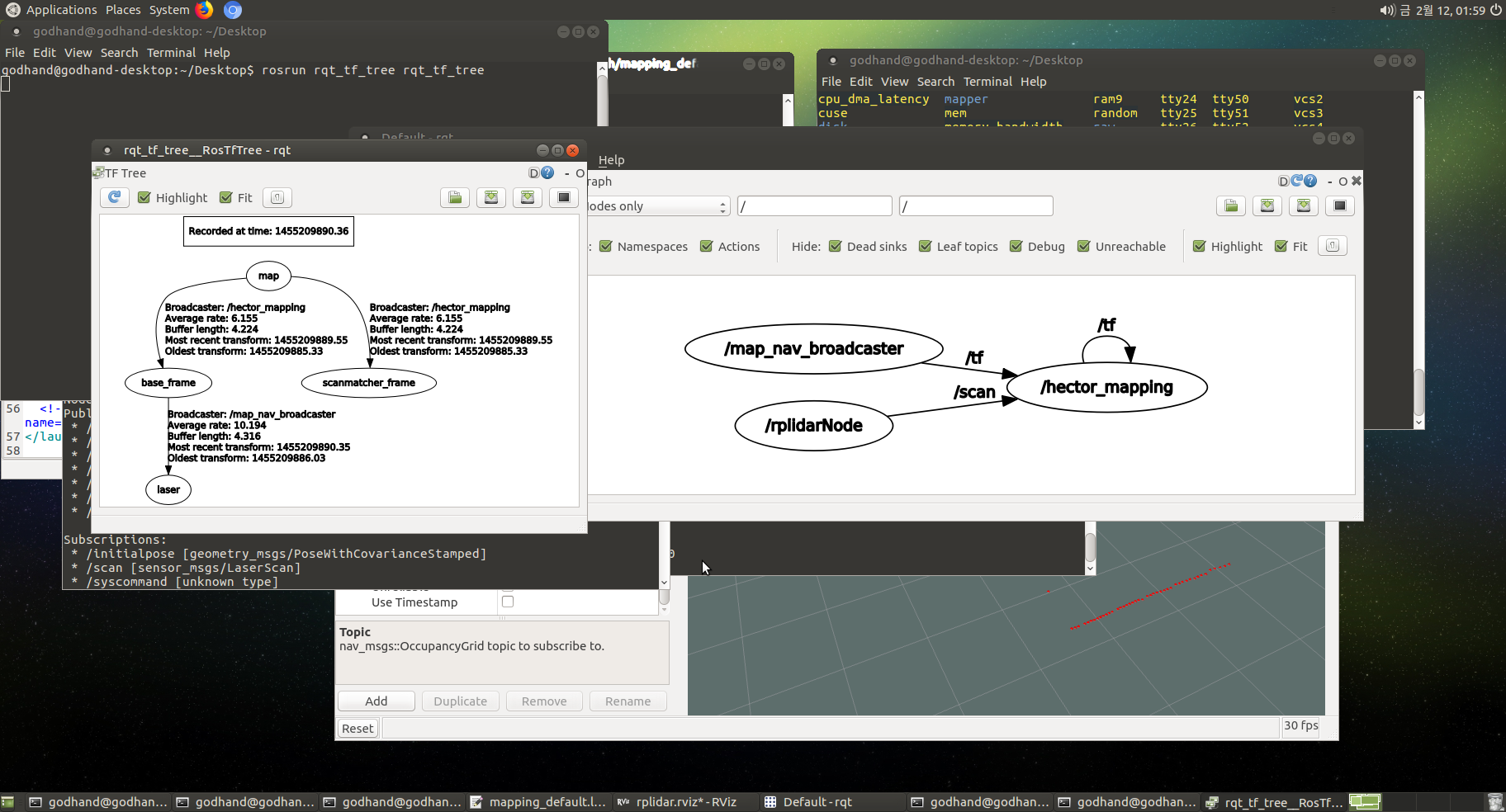
Is this tf tree wrong?
This is my tf tree about hector slam on raspberry pi
now, There are no errors in terminal.
But also there is no map..
I think it could be a communication problem between nodes.
My Internet is unstable.
If not I can't make any guesses.
add a comment
