
Incorrect opening a urdf file in Gazebo
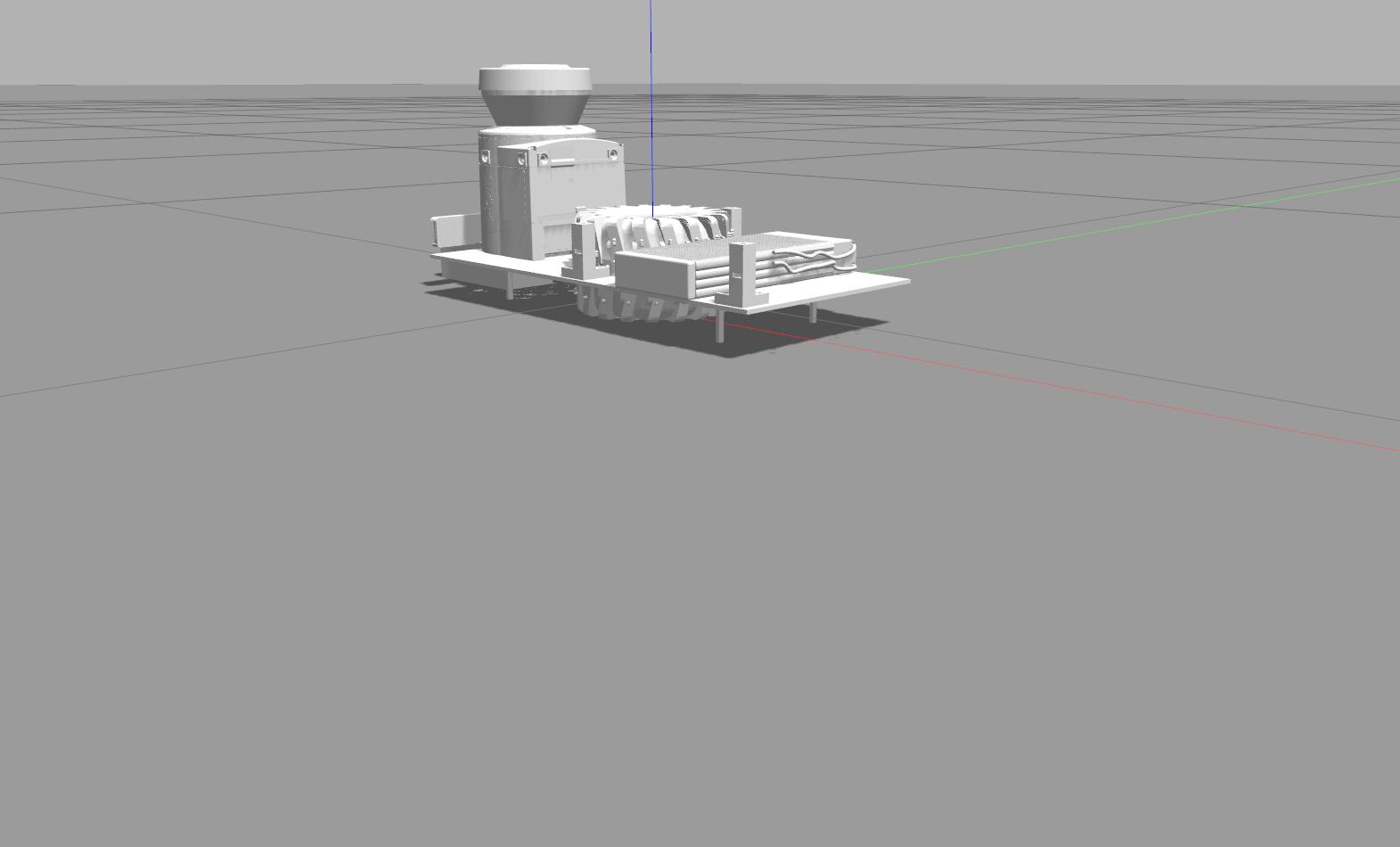
Hi everyone. I created a .URDF from SolidWorks using SW2URDF plugin. This urdf file that I created, opens in rviz smoothly, however this urdf file opens in the gazebo incorrectly and the model file has missing links and joints.
moving joints have linkage and linkage joints(eg: wheel) but none for fixed joints(eg: lidar,realsense ..).
HOW CAN I SOLVE THE PROBLEM?
The first time I run the file gazebo.Launch is the model gazebo image(wrong):
the image that appears when I reload the model after pressing the stop button on the lower toolbar:
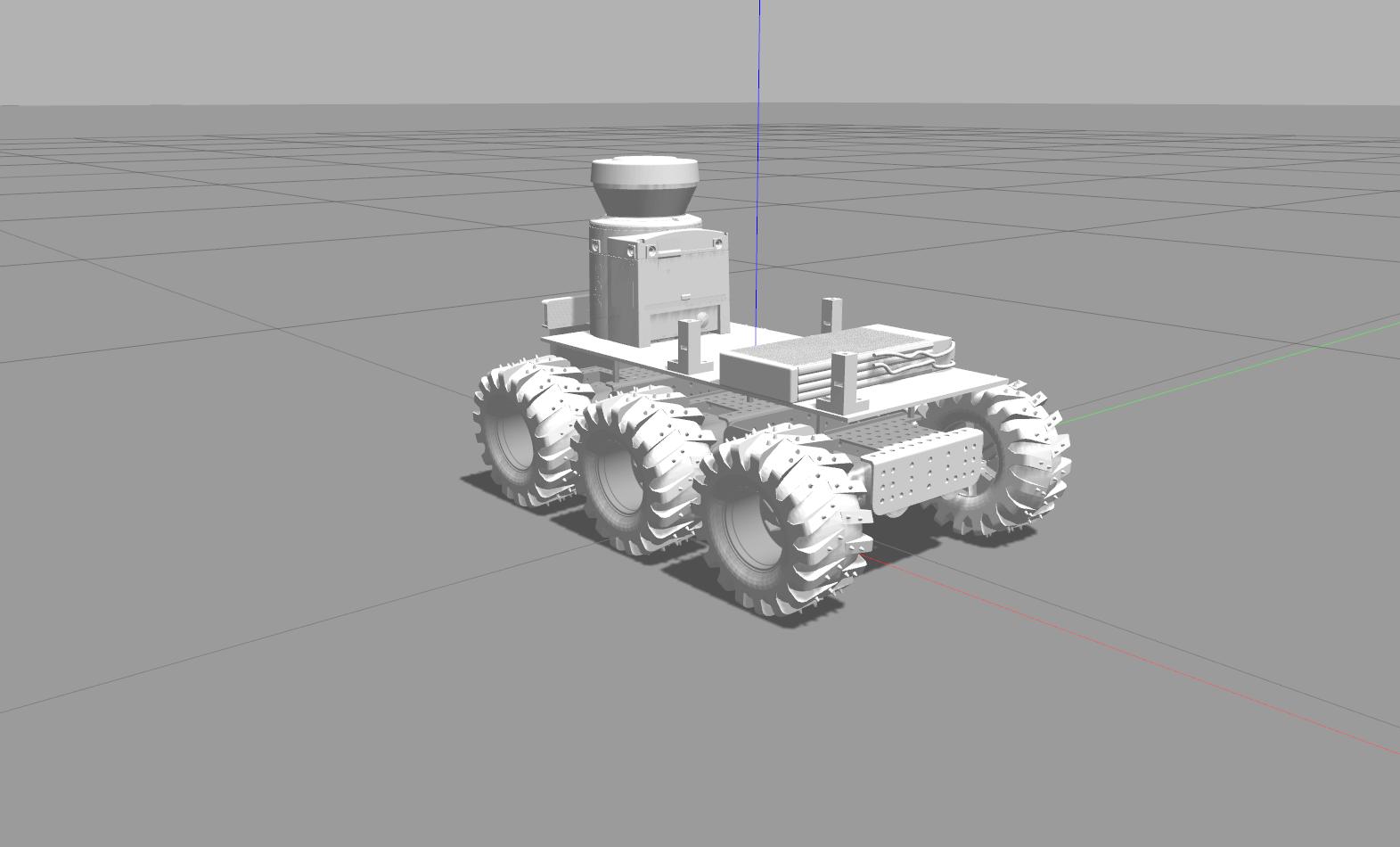
(model reload command: rosrun gazebo_ros spawn_model -file rospack find car_design_full/urdf/car_design_full.urdf -urdf -z 0.1 -model my_object)
but the same mistakes still continue ( the model file has missing links and joints.)
Gazebo errors that occur when I edit the model file:
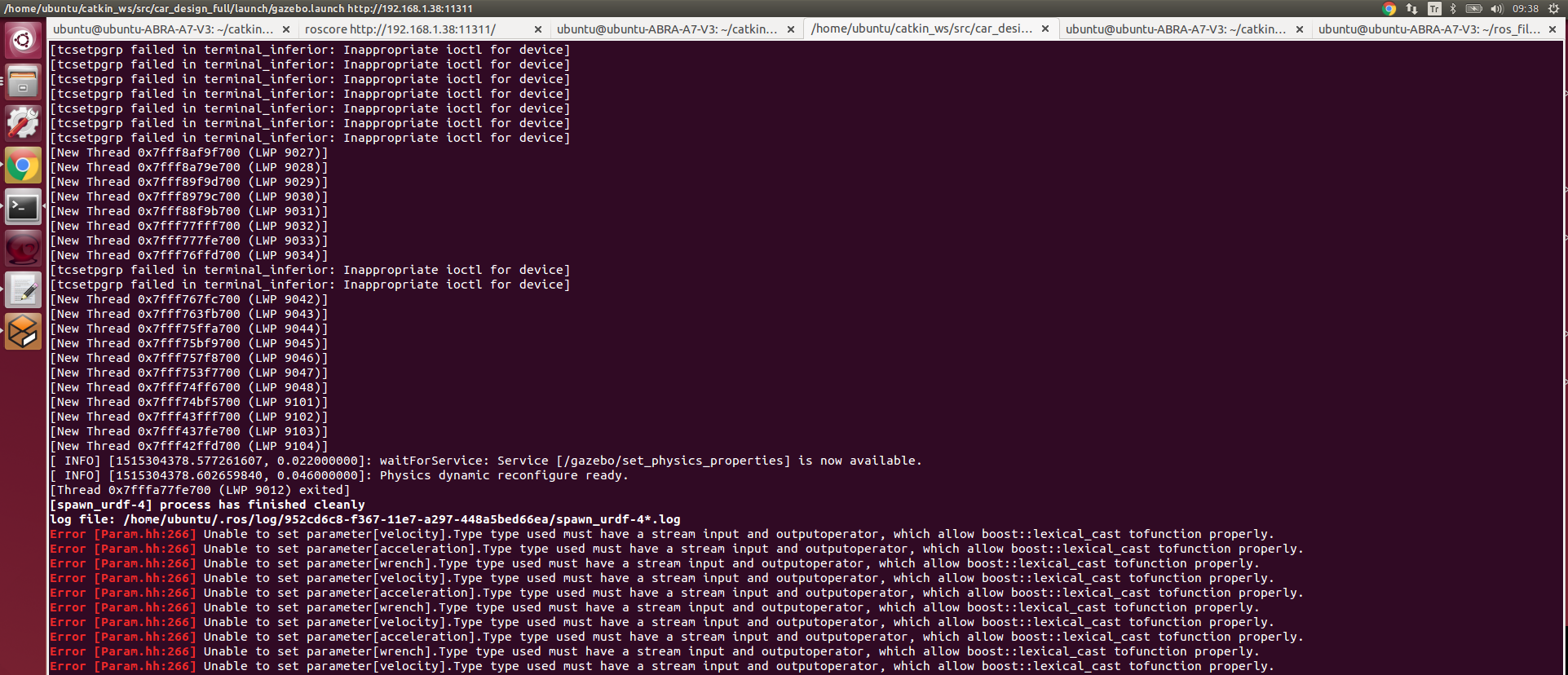
Error [Param.hh:266] Unable to set parameter[velocity].Type type used must have a stream input and outputoperator, which allow boost::lexical_cast tofunction properly.
Error [Param.hh:266] Unable to set parameter[acceleration].Type type used must have a stream input and outputoperator, which allow boost::lexical_cast tofunction properly.
Error [Param.hh:266] Unable to set parameter[wrench].Type type used must have a stream input and outputoperator, which allow boost::lexical_cast tofunction properly.
log file: /home/ubuntu/.ros/log/952cd6c8-f367-11e7-a297-448a5bed66ea/spawn_urdf-4*.log:
[rospy.client][INFO] 2018-01-07 08:49:06,802: init_node, name[/spawn_urdf], pid[7183]
[xmlrpc][INFO] 2018-01-07 08:49:06,803: XML-RPC server binding to 0.0.0.0:0
[xmlrpc][INFO] 2018-01-07 08:49:06,803: Started XML-RPC server [http://192.168.1.38:45182/]
[rospy.init][INFO] 2018-01-07 08:49:06,803: ROS Slave URI: [http://192.168.1.38:45182/]
[rospy.impl.masterslave][INFO] 2018-01-07 08:49:06,803: _ready: http://192.168.1.38:45182/
[xmlrpc][INFO] 2018-01-07 08:49:06,804: xml rpc node: starting XML-RPC server
[rospy.registration][INFO] 2018-01-07 08:49:06,804: Registering with master node http://192.168.1.38:11311
[rospy.init][INFO] 2018-01-07 08:49:06,903: registered with master
[rospy.rosout][INFO] 2018-01-07 08:49:06,904: initializing /rosout core topic
[rospy.rosout][INFO] 2018-01-07 08:49:06,905: connected to core topic /rosout
[rospy.simtime][INFO] 2018-01-07 08:49:06,906: initializing /clock core topic
[rospy.simtime][INFO] 2018-01-07 08:49:06,907: connected to core topic /clock
[rosout][INFO] 2018-01-07 08:49:06,909: Loading model xml from file
[rosout][INFO] 2018-01-07 08:49:06,910: Waiting for service /gazebo/spawn_urdf_model
[rospy.internal][INFO] 2018-01-07 08:49:07,177: topic[/rosout] adding connection to [/rosout], count 0
[rospy.internal][INFO] 2018-01-07 08:49:08,982: topic[/clock] adding connection to [http://192.168.1.38:34827/], count 0
[rosout][INFO] 2018-01-07 08:49:09,020: Calling service /gazebo/spawn_urdf_model
[rosout][INFO] 2018-01-07 08:49:09,327: Spawn status: SpawnModel: Successfully spawned model
[rospy.core][INFO] 2018-01-07 08:49:09,327: signal_shutdown [atexit]
[rospy.internal][INFO] 2018-01-07 08:49:09,329: topic[/rosout] removing connection to ...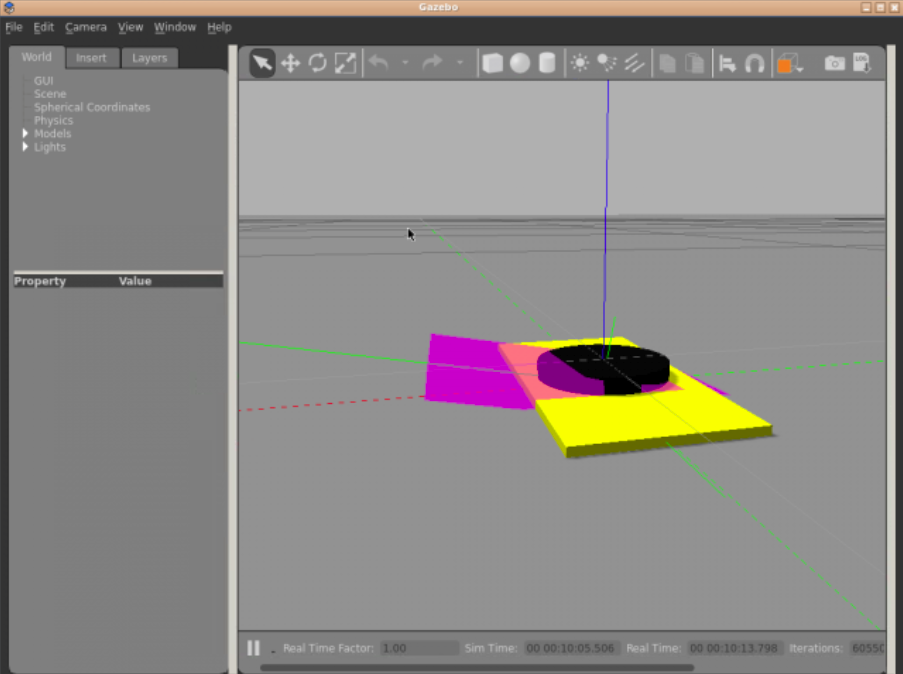

Welcome! Can you please update your question with a copy and paste of the error that Gazebo is giving you as opposed to linking to a screenshot? Text is searchable, images are not.
In addition to that: I've given you enough karma to embed all your images in your post. Could you please do that?
Mr. @jayess I prepared my question. Could you please look at my problem now ?
Again, please copy and paste the error. Text is searchable images are not.